
Making big data manageable
Technique shrinks data sets while preserving their fundamental mathematical relationships.
Technique shrinks data sets while preserving their fundamental mathematical relationships.

CSAIL system lets users design and fabricate drones with a wide range of shapes and structures.

Self-driving scooter demonstrated at MIT complements autonomous golf carts and city cars.

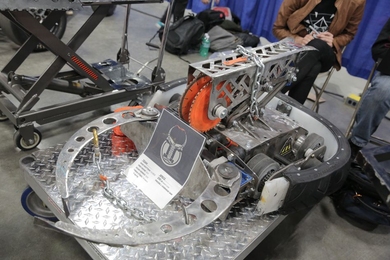
James Kirtley discusses the transition from gas to electric motors and the impact these motors have had on modern technologies.

Senior Sarah Hensley aims to improve Earth's most advanced humanoid robot, in advance of its trip to the Red Planet.
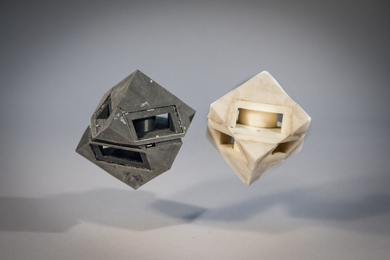
By “programming” customized soft materials, CSAIL team can 3-D print safer, nimbler, more durable robots.

MIT, AMS Institute will collaborate to solve complex urban problems for Amsterdam with the development of autonomous "roboats."

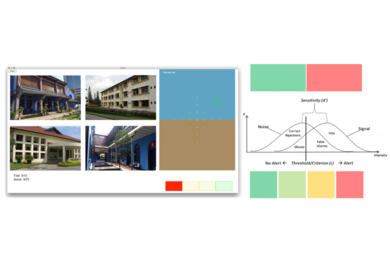
System from Computer Science and Artificial Intelligence Lab suggests where to move patients and who should do C-sections.
Analysis of ant colony behavior could yield better algorithms for network communication.
MIT’s thriving maker culture is on display in ABC network’s “BattleBots” competition.
MIT-SUTD researchers are creating improved interfaces to help machines and humans work together to complete tasks.

Initial focus will be on transformative technologies, autonomy, and robotics.
Robot unfolds from ingestible capsule, removes button battery stuck to wall of simulated stomach.

Motors smoking, robot reenacted Paul Revere’s ride to win competition.
