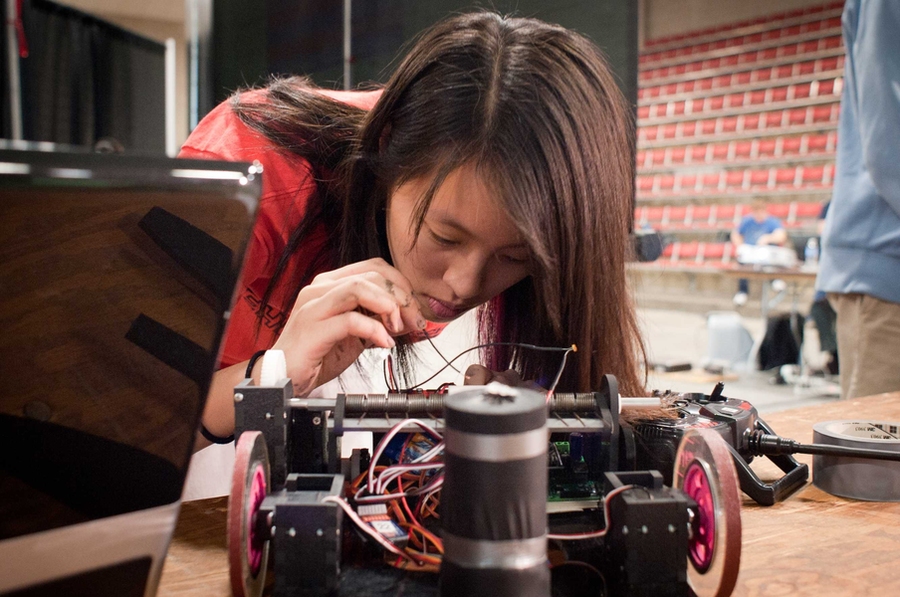







MIT’s Johnson Athletic Center took on the aura of an old-fashioned county fair on Thursday night, complete with popcorn, balloons, jugglers, cotton candy and pitchmen wearing brightly colored jackets and bowties. But rather than ring tosses and sheep-shearing, the central event was a series of one-on-one matchups between an amazing variety of robots that students have spent the whole semester designing, building and testing.
This was the culmination of MIT’s renowned course in mechanical engineering, “Design and Manufacturing 1,” better known by its course number, 2.007. As always, a series of tasks set by the designers of this year’s competition triggered a wild proliferation of imaginative designs and strategies. But in the end, relatively simple, stable and repeatable approaches won the competition.
“You don’t always know what the best approach is going to be,” says Daniel Frey, associate professor of mechanical engineering and engineering systems and the lead instructor of the class. And this year, a variety of tasks for the robots to choose from, on a playing field modeled after a county fair, added to the variety of approaches.
Even seemingly simple challenges can lead to inventive solutions: For example, a “strength tester” — the carnival game where striking a lever with a mallet sends a projectile upward to strike a bell — was approached quite differently by different students. Some struck the lever with an actual hammer or mallet mounted on a hinge, while some ignored the lever and built miniature elevators to gently lift the projectile up to the bell; others built spring-loaded spatula-like devices to flip the projectile up.
Besides the strength test, other challenges teams could choose for their robots included the mechanical removal of tickets from a roll — which turned out to be surprisingly difficult — and the inflating of a balloon from a container of compressed air — made harder by the difficulty of maintaining a tight seal. A final challenge was a Ferris wheel that could be turned in one direction or the other by robots on opposite sides of the field; the number of rotations the Ferris wheel made served to multiply the points gained through successful completion of the other tests.
Most of the students, all of whom were issued identical kits of parts to work with at the beginning of the term, built single robots to perform one or more of the tasks. But the rules allowed for making multiple robots, and the ultimate winner, Kawin Surakitbovorn, a sophomore majoring in physics, used a two-robot system. One device used a scissors-jack elevator to raise the strength-test projectile, while a second, much smaller robot concentrated on turning the Ferris wheel.
The complexity of the playing field, the different ways of scoring, and the vagaries of actual competition — where sometimes a battery fails or a small piece falls off a robot — led to a wide range of outcomes: Even though preliminary matchups had already winnowed the roughly 130 robots to just 32 final contestants, the scores in the finals ranged all the way from 0 to 150.
As is so often the case at MIT, the students had to deal with competing demands for their time. Runner-up Sarah Southerland, a senior majoring in architecture and mechanical engineering, had to leave in the middle of the competition to take part in a dance performance, getting back in time to control her robot for the final match. Unlike many of the machines that were designed to perform multiple tasks, Southerland’s single small robot was designed to do a single task steadily and reliably: lifting the strength-test projectile using a spatula-like device.
While students compete intensely in the 2.007 finale, winning doesn’t have any effect on a student’s grade, and participation in the contest is optional. But this year’s winners did earn more than just bragging rights: In addition to their awards, the top three finishers won the opportunity to fly to Japan this summer to represent MIT in an intensive two-week International Design Competition.
Two additional cash awards were given for robot designs that were especially clever and innovative, but did not end up placing in the top ranks. The awards went to sophomore Sam Whittemore (for an interesting approach to the strength test that used a spinning flywheel to build up momentum before striking the lever) and junior Joe Church (for a control system that used a touch-tone phone, an unusual system of pivoting wheels, and a clever mechanism for raising the projectile via a device akin to an oversized tape-measure).
“I think the most impressive thing is the teamwork,” Frey says: Even though students compete individually, throughout the semester they share ideas and help each other out with problems. That kind of teamwork and cooperation, he says, is one of the class’s most important lessons.
This was the culmination of MIT’s renowned course in mechanical engineering, “Design and Manufacturing 1,” better known by its course number, 2.007. As always, a series of tasks set by the designers of this year’s competition triggered a wild proliferation of imaginative designs and strategies. But in the end, relatively simple, stable and repeatable approaches won the competition.
“You don’t always know what the best approach is going to be,” says Daniel Frey, associate professor of mechanical engineering and engineering systems and the lead instructor of the class. And this year, a variety of tasks for the robots to choose from, on a playing field modeled after a county fair, added to the variety of approaches.
Even seemingly simple challenges can lead to inventive solutions: For example, a “strength tester” — the carnival game where striking a lever with a mallet sends a projectile upward to strike a bell — was approached quite differently by different students. Some struck the lever with an actual hammer or mallet mounted on a hinge, while some ignored the lever and built miniature elevators to gently lift the projectile up to the bell; others built spring-loaded spatula-like devices to flip the projectile up.
Besides the strength test, other challenges teams could choose for their robots included the mechanical removal of tickets from a roll — which turned out to be surprisingly difficult — and the inflating of a balloon from a container of compressed air — made harder by the difficulty of maintaining a tight seal. A final challenge was a Ferris wheel that could be turned in one direction or the other by robots on opposite sides of the field; the number of rotations the Ferris wheel made served to multiply the points gained through successful completion of the other tests.
Most of the students, all of whom were issued identical kits of parts to work with at the beginning of the term, built single robots to perform one or more of the tasks. But the rules allowed for making multiple robots, and the ultimate winner, Kawin Surakitbovorn, a sophomore majoring in physics, used a two-robot system. One device used a scissors-jack elevator to raise the strength-test projectile, while a second, much smaller robot concentrated on turning the Ferris wheel.
The complexity of the playing field, the different ways of scoring, and the vagaries of actual competition — where sometimes a battery fails or a small piece falls off a robot — led to a wide range of outcomes: Even though preliminary matchups had already winnowed the roughly 130 robots to just 32 final contestants, the scores in the finals ranged all the way from 0 to 150.
As is so often the case at MIT, the students had to deal with competing demands for their time. Runner-up Sarah Southerland, a senior majoring in architecture and mechanical engineering, had to leave in the middle of the competition to take part in a dance performance, getting back in time to control her robot for the final match. Unlike many of the machines that were designed to perform multiple tasks, Southerland’s single small robot was designed to do a single task steadily and reliably: lifting the strength-test projectile using a spatula-like device.
While students compete intensely in the 2.007 finale, winning doesn’t have any effect on a student’s grade, and participation in the contest is optional. But this year’s winners did earn more than just bragging rights: In addition to their awards, the top three finishers won the opportunity to fly to Japan this summer to represent MIT in an intensive two-week International Design Competition.
Two additional cash awards were given for robot designs that were especially clever and innovative, but did not end up placing in the top ranks. The awards went to sophomore Sam Whittemore (for an interesting approach to the strength test that used a spinning flywheel to build up momentum before striking the lever) and junior Joe Church (for a control system that used a touch-tone phone, an unusual system of pivoting wheels, and a clever mechanism for raising the projectile via a device akin to an oversized tape-measure).
“I think the most impressive thing is the teamwork,” Frey says: Even though students compete individually, throughout the semester they share ideas and help each other out with problems. That kind of teamwork and cooperation, he says, is one of the class’s most important lessons.