Although unmanned, wheeled rovers have explored the surfaces of the moon and Mars for decades, these vehicles have limits — they can’t crawl inside craters, scale cliffs or travel long distances.
For more than two years, a team of students led by Professor of the Practice of Astronautics and former NASA astronaut Jeffrey Hoffman in MIT’s Department of Aeronautics and Astronautics has been collaborating with engineers from the Charles Stark Draper Laboratory to design and build a prototype for a new type of robotic explorer that would hop over, rather than traverse, a planetary surface. Hopping, they believe, would make it easier for an explorer to access tricky sites and travel greater distances, and thus collect more data during a mission.
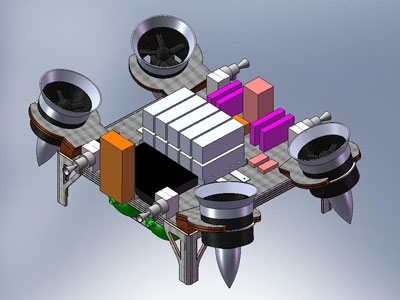
Known as the Terrestrial Artificial Lunar and Reduced Gravity Simulator, or Talaris, the three-foot-wide vehicle is a prototype of a larger hopper that would be used in space. The team that built it wants to use Talaris on Earth to test guidance, navigation and control (GNC) software developed by Draper that would then be used to navigate the space-based hopper autonomously. Several graduate students involved with the project will present the latest details about the prototype later this month at the American Institute of Aeronautics and Astronautics Space 2010 conference in California.
The prototype is an outgrowth of MIT’s effort to win the Google Lunar X Prize, a $20 million competition to become the first team to send a privately funded spacecraft to the moon, travel 500 meters across its surface, and transmit video and images back to Earth. Both MIT and Draper are members of Next Giant Leap, one of about 20 teams registered in the competition.
Building Talaris to test the hopper waters
Talaris uses two propulsion systems. The main system consists of four downward-pointing electric ducted fans that provide lift to counter the vehicle’s weight and simulate the gravity environments of different planetary bodies. The second system uses compressed nitrogen gas to maneuver the vehicle as it operates in the simulated gravity conditions. With this setup, the researchers can repeatedly test different navigation algorithms on Earth to perfect the control software.
What distinguishes Talaris from other explorer prototypes is its ability to test how a hopper functions in different gravity scenarios before sending one into space, according to Seamus Tuohy, director of space systems at Draper, which is funding Talaris. “Other organizations had developed little lander prototypes, but the drawback was that they were essentially Earth landers,” Tuohy says. “MIT and Draper wanted to do better — to be able to say that we have the GNC expertise to do hopping in other environments, and that we have demonstrated it with Talaris.”
Although Talaris began with the goal of hopping across the moon, the Talaris team is pushing for hoppers to be used to explore any body in the solar system that has enough gravity to make hopping feasible, including asteroids. “There are limits to the terrain you can access on wheels, and with a hopper, you simply hop in, collect data and hop out,” Hoffman says, noting that hoppers can be used to explore deep craters on the moon that are thought to contain water, measure the magnetism of steep cliffs or set up a network of seismometers by placing sensors at multiple locations.
The ability of hoppers to travel long distances and visit multiple sites is also valuable. Whereas the rovers that have been used to explore Mars since the late 1990s traveled several kilometers over several years, hoppers could travel hundreds of kilometers per hop, depending on their size.
Hopper technology could even enable a human mission to Mars where astronauts orbiting the planet could use a high-bandwidth signal to tele-operate hoppers on the Martian surface, according to Phillip Cunio, an AeroAstro doctorate student who is working with Hoffman to lead the student group working on Talaris. “This would enable direct human oversight of exploration — with all the decision-making capability and flexibility that implies — without the risks of sending human bodies to the surface of Mars,” he says.
Filling the toolkit of planetary exploration
But hoppers do have one drawback: their engines require fuel. Electric rovers, in contrast, only need to recharge their batteries to run their wheels. Given that a hopper is limited to a certain number of hops, the Talaris researchers stress that hoppers should be thought of as an additional tool to complement rovers. Even so, Cunio says, engineers could design hoppers that could be useful even after their fuel runs out. For instance, they might act as solar array-powered rovers, or make fuel from local materials.
For now, the Talaris team is focused on finalizing the construction of Talaris. Although each component has been built and tested individually, the group has yet to test the entire system, which Cunio estimates will weigh about 110 pounds. The team hopes to complete a test hop — Talaris will hop about 20 meters by hovering, moving horizontally and descending — by the end of the calendar year. The researchers predict that if Next Giant Leap is able to secure funding, a large-scale planetary surface hopper explorer could take flight by the end of 2014, the deadline for contestants in the Google Lunar X Prize competition to complete a trip to the moon.
For more than two years, a team of students led by Professor of the Practice of Astronautics and former NASA astronaut Jeffrey Hoffman in MIT’s Department of Aeronautics and Astronautics has been collaborating with engineers from the Charles Stark Draper Laboratory to design and build a prototype for a new type of robotic explorer that would hop over, rather than traverse, a planetary surface. Hopping, they believe, would make it easier for an explorer to access tricky sites and travel greater distances, and thus collect more data during a mission.
Known as the Terrestrial Artificial Lunar and Reduced Gravity Simulator, or Talaris, the three-foot-wide vehicle is a prototype of a larger hopper that would be used in space. The team that built it wants to use Talaris on Earth to test guidance, navigation and control (GNC) software developed by Draper that would then be used to navigate the space-based hopper autonomously. Several graduate students involved with the project will present the latest details about the prototype later this month at the American Institute of Aeronautics and Astronautics Space 2010 conference in California.
The prototype is an outgrowth of MIT’s effort to win the Google Lunar X Prize, a $20 million competition to become the first team to send a privately funded spacecraft to the moon, travel 500 meters across its surface, and transmit video and images back to Earth. Both MIT and Draper are members of Next Giant Leap, one of about 20 teams registered in the competition.
Building Talaris to test the hopper waters
Talaris uses two propulsion systems. The main system consists of four downward-pointing electric ducted fans that provide lift to counter the vehicle’s weight and simulate the gravity environments of different planetary bodies. The second system uses compressed nitrogen gas to maneuver the vehicle as it operates in the simulated gravity conditions. With this setup, the researchers can repeatedly test different navigation algorithms on Earth to perfect the control software.
What distinguishes Talaris from other explorer prototypes is its ability to test how a hopper functions in different gravity scenarios before sending one into space, according to Seamus Tuohy, director of space systems at Draper, which is funding Talaris. “Other organizations had developed little lander prototypes, but the drawback was that they were essentially Earth landers,” Tuohy says. “MIT and Draper wanted to do better — to be able to say that we have the GNC expertise to do hopping in other environments, and that we have demonstrated it with Talaris.”
Although Talaris began with the goal of hopping across the moon, the Talaris team is pushing for hoppers to be used to explore any body in the solar system that has enough gravity to make hopping feasible, including asteroids. “There are limits to the terrain you can access on wheels, and with a hopper, you simply hop in, collect data and hop out,” Hoffman says, noting that hoppers can be used to explore deep craters on the moon that are thought to contain water, measure the magnetism of steep cliffs or set up a network of seismometers by placing sensors at multiple locations.
The ability of hoppers to travel long distances and visit multiple sites is also valuable. Whereas the rovers that have been used to explore Mars since the late 1990s traveled several kilometers over several years, hoppers could travel hundreds of kilometers per hop, depending on their size.
Hopper technology could even enable a human mission to Mars where astronauts orbiting the planet could use a high-bandwidth signal to tele-operate hoppers on the Martian surface, according to Phillip Cunio, an AeroAstro doctorate student who is working with Hoffman to lead the student group working on Talaris. “This would enable direct human oversight of exploration — with all the decision-making capability and flexibility that implies — without the risks of sending human bodies to the surface of Mars,” he says.
Filling the toolkit of planetary exploration
But hoppers do have one drawback: their engines require fuel. Electric rovers, in contrast, only need to recharge their batteries to run their wheels. Given that a hopper is limited to a certain number of hops, the Talaris researchers stress that hoppers should be thought of as an additional tool to complement rovers. Even so, Cunio says, engineers could design hoppers that could be useful even after their fuel runs out. For instance, they might act as solar array-powered rovers, or make fuel from local materials.
For now, the Talaris team is focused on finalizing the construction of Talaris. Although each component has been built and tested individually, the group has yet to test the entire system, which Cunio estimates will weigh about 110 pounds. The team hopes to complete a test hop — Talaris will hop about 20 meters by hovering, moving horizontally and descending — by the end of the calendar year. The researchers predict that if Next Giant Leap is able to secure funding, a large-scale planetary surface hopper explorer could take flight by the end of 2014, the deadline for contestants in the Google Lunar X Prize competition to complete a trip to the moon.