An origami-inspired medical patch for sealing internal injuries
The patch, which can be folded around surgical tools, may someday be used in robotic surgery to repair tissues and organs.
The patch, which can be folded around surgical tools, may someday be used in robotic surgery to repair tissues and organs.

At Open Learning Talks, Cynthia Breazeal and Eric Klopfer discuss artificial intelligence education.
A new system devises hardware architectures to hasten robots’ response time.
MassBridge will create curriculum for the advanced manufacturing needs of today’s economy.
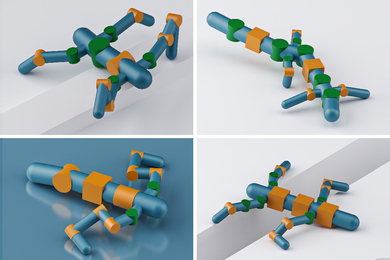
MIT researchers’ new system optimizes the shape of robots for traversing various terrain types.

Anthropologist touches on the history of tech-related job displacement and explores how other countries approach policies on robots, skills, and learning.

MIT task force wraps up with a final conference, sounds note of optimism that new ideas, better policies can help sustain good careers.

Technologies like robots and artificial intelligence could partner with humans, not oust them from work, research and business leaders say.
The subunits could be robotically assembled to produce large, complex objects, including cars, robots, or wind turbine blades.

MIT Task Force on the Work of the Future identifies ways to align new technologies with durable careers.

New approach could spark an era of battery-free ocean exploration, with applications ranging from marine conservation to aquaculture.
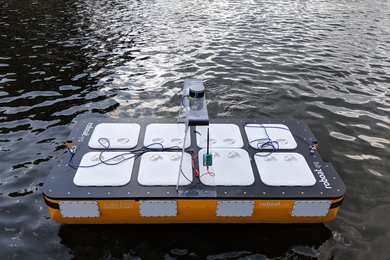
Five years in the making, MIT’s autonomous floating vessels get a size upgrade and learn a new way to communicate aboard the waters.
Book co-authored by Associate Professor Julie Shah and Laura Major SM ’05 explores a future populated with robot helpers.
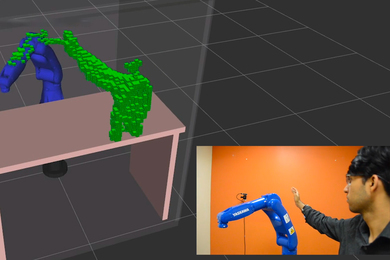
Realtime Robotics has created a controller that helps robots safely move around on the fly.

Mobile system could reduce health care workers’ exposure to Covid-19 virus.