Tiny robot boats build floating structures
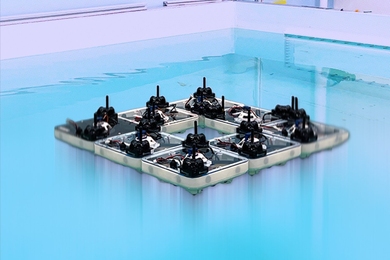
MIT researchers developed FloatForm, a swarm of small aquatic robots that snap together like ants forming a raft, assembling into reconfigurable structures on the water.
MIT researchers developed FloatForm, a swarm of small aquatic robots that snap together like ants forming a raft, assembling into reconfigurable structures on the water.

Researchers combined an efficient algorithm with dedicated hardware to rapidly generate 3D maps for navigation using minimal memory and power.
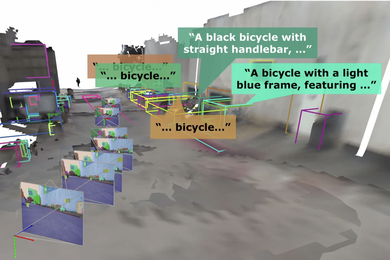
A new spatial memory system for robots efficiently captures details about the objects they see while exploring their environment.
An expert in behavioral science and transportation, Zhao combines these studies with AI and public policy to address some of the most urgent challenges facing cities.
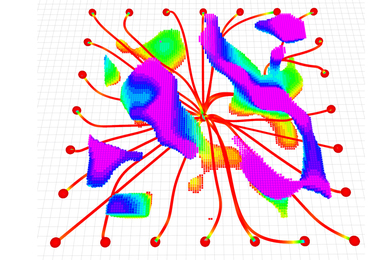
By rapidly generating a smooth path plan that cuts travel time and avoids obstacles, the open-source “MIGHTY” system could streamline disaster recovery and parcel delivery.
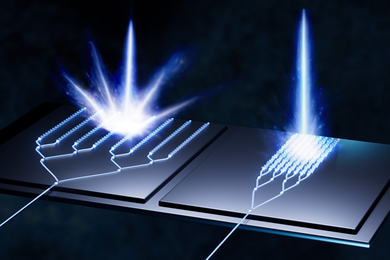
With a novel design, MIT researchers overcame a stubborn problem that has limited the effectiveness of chip-based systems for lidar.
Associate Professor Richard Linares is helping satellites safely navigate in increasingly congested orbits.

Navy veteran and EMBA student Greg Knutson is building the skills to develop uncrewed aircraft systems while pursuing innovation in advanced manufacturing.

In 16.85 (Design and Testing of Autonomous Vehicles), AeroAstro students build software that allows autonomous flight vehicles to navigate unknown environments.
A giant in aviation, Liebeck had taught at MIT since 2000 and was a pioneer in the famed Blended-Wing Body experimental aircraft.
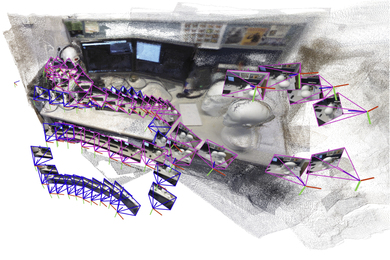
A new approach developed at MIT could help a search-and-rescue robot navigate an unpredictable environment by rapidly generating an accurate map of its surroundings.

A decade-plus alliance between MIT’s AgeLab and Toyota’s Collaborative Safety Research Center is recognized as a key contributor to advancements in automotive safety and human-machine interaction.

New research shows automatically controlling vehicle speeds to mitigate traffic at intersections can cut carbon emissions between 11 and 22 percent.

MIT Advanced Vehicle Technology Consortium marks a decade of developing data that improve understanding of how drivers use and respond to increasingly sophisticated automotive features.

The system automatically learns to adapt to unknown disturbances such as gusting winds.