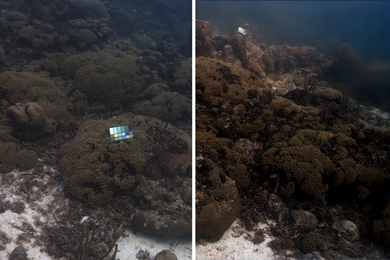
Imaging technique removes the effect of water in underwater scenes
The color-correcting tool, known as “SeaSplat,” reveals more realistic colors of underwater features.
The color-correcting tool, known as “SeaSplat,” reveals more realistic colors of underwater features.
“IntersectionZoo,” a benchmarking tool, uses a real-world traffic problem to test progress in deep reinforcement learning algorithms.

2.S01 (Introduction to Autonomous Underwater Vehicles) creates a learning environment where every student handles a robot.

Data from the devices will help future astronauts navigate the moon’s south polar region and search for frozen water.
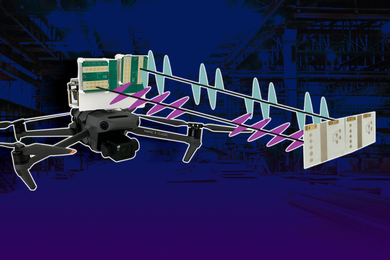
A new low-power system using radio frequency waves takes a major step toward autonomous, indoor drone navigation.
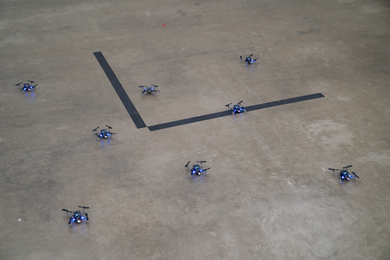
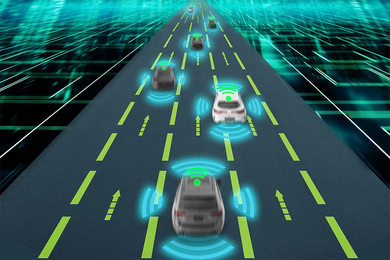
New research could improve the safety of drone shows, warehouse robots, and self-driving cars.

Associate Professor Luca Carlone is working to give robots a more human-like awareness of their environment.

Corvus Robotics, founded by Mohammed Kabir ’21, is using drones that can navigate in GPS-denied environments to expedite inventory management.

A small fleet of autonomous surface vessels forms a large sonar array for finding submerged objects.

MIT CSAIL director and EECS professor named a co-recipient of the honor for her robotics research, which has expanded our understanding of what a robot can be.

The MIT Advanced Vehicle Technology Consortium provides data-driven insights into driver behavior, along with trust in AI and advanced vehicle technology.

A new method called Clio enables robots to quickly map a scene and identify the items they need to complete a given set of tasks.

Drone company founders with MIT Advanced Study Program roots seek to bring aerial delivery to the mainstream.
Neural network controllers provide complex robots with stability guarantees, paving the way for the safer deployment of autonomous vehicles and industrial machines.
This technique could lead to safer autonomous vehicles, more efficient AR/VR headsets, or faster warehouse robots.