
In its first year of operation, the Intelligent Towing Tank (ITT) conducted about 100,000 total experiments, essentially completing the equivalent of a PhD student’s five years’ worth of experiments in a matter of weeks.
The automated experimental facility, developed in the MIT Sea Grant Hydrodynamics Laboratory, automatically and adaptively performs, analyzes, and designs experiments exploring vortex-induced vibrations (VIVs). Important for engineering offshore ocean structures like marine drilling risers that connect underwater oil wells to the surface, VIVs remain somewhat of a phenomenon to researchers due to the high number of parameters involved.
Guided by active learning, the ITT conducts series of experiments wherein the parameters of each next experiment are selected by a computer. Using an “explore-and-exploit” methodology, the system dramatically reduces the number of experiments required to explore and map the complex forces governing VIVs.
What began as then-PhD candidate Dixia Fan’s quest to cut back on conducting a thousand or so laborious experiments — by hand — led to the design of the innovative system and a paper recently published in the journal Science Robotics.
Fan, now a postdoc, and a team of researchers from the MIT Sea Grant College Program and MIT’s Department of Mechanical Engineering, École Normale Supérieure de Rennes, and Brown University, reveal a potential paradigm shift in experimental research, where humans, computers, and robots can collaborate more effectively to accelerate scientific discovery.
The 33-foot whale of a tank comes alive, working without interruption or supervision on the venture at hand — in this case, exploring a canonical problem in the field of fluid-structure interactions. But the researchers envision applications of the active learning and automation approach to experimental research across disciplines, potentially leading to new insights and models in multi-input/multi-output nonlinear systems.
VIVs are inherently-nonlinear motions induced on a structure in an oncoming irregular cross-stream, which prove vexing to study. The researchers report that the number of experiments completed by the ITT is already comparable to the total number of experiments done to date worldwide on the subject of VIVs.
The reason for this is the large number of independent parameters, from flow velocity to pressure, involved in studying the complex forces at play. According to Fan, a systematic brute-force approach — blindly conducting 10 measurements per parameter in an eight-dimensional parametric space — would require 100 million experiments.
With the ITT, Fan and his collaborators have taken the problem into a wider parametric space than previously practicable to explore. “If we performed traditional techniques on the problem we studied,” he explains, “it would take 950 years to finish the experiment.” Clearly infeasible, so Fan and the team integrated a Gaussian process regression learning algorithm into the ITT. In doing so, the researchers reduced the experimental burden by several orders of magnitude, requiring only a few thousand experiments.
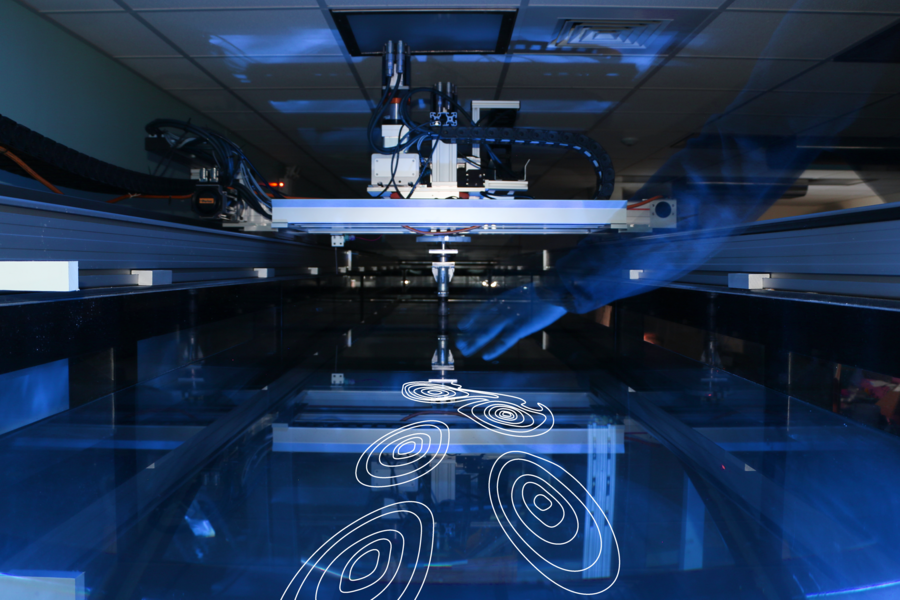
The robotic system automatically conducts an initial sequence of experiments, periodically towing a submerged structure along the length of the tank at a constant velocity. Then, the ITT takes partial control over the parameters of each next experiment by minimizing suitable acquisition functions of quantified uncertainties and adapting to achieve a range of objectives, like reduced drag.
Earlier this year, Fan was awarded an MIT Mechanical Engineering de Florez Award for "Outstanding Ingenuity and Creative Judgment" in the development of the ITT. “Dixia’s design of the Intelligent Towing Tank is an outstanding example of using novel methods to reinvigorate mature fields,” says Michael Triantafyllou, Henry L. and Grace Doherty Professor in Ocean Science and Engineering, who acted as Fan’s doctoral advisor.
Triantafyllou, a co-author on this paper and the director of the MIT Sea Grant College Program, says, “MIT Sea Grant has committed resources and funded projects using deep-learning methods in ocean-related problems for several years that are already paying off.” Funded by the National Oceanic and Atmospheric Administration and administered by the National Sea Grant Program, MIT Sea Grant is a federal-Institute partnership that brings the research and engineering core of MIT to bear on ocean-related challenges.
Fan’s research points to a number of others utilizing automation and artificial intelligence in science: At Caltech, a robot scientist named “Adam” generates and tests hypotheses; at the Defense Advanced Research Projects Agency, the Big Mechanism program reads tens of thousands of research papers to generate new models.
Similarly, the ITT applies human-computer-robot collaboration to accelerate experimental efforts. The system demonstrates a potential paradigm shift in conducting research, where automation and uncertainty quantification can considerably accelerate scientific discovery. The researchers assert that the machine learning methodology described in this paper can be adapted and applied in and beyond fluid mechanics, to other experimental fields.
Other contributors to the paper include George Karniadakis from Brown University, who is also affiliated with MIT Sea Grant; Gurvan Jodin from ENS Rennes; MIT PhD candidate in mechanical engineering Yu Ma; and Thomas Consi, Luca Bonfiglio, and Lily Keyes from MIT Sea Grant.
This work was supported by DARPA, Fariba Fahroo, and Jan Vandenbrande through an EQUiPS (Enabling Quantification of Uncertainty in Physical Systems) grant, as well as Shell, Subsea 7, and the MIT Sea Grant College Program.