Since 2000, there have been 110 million car accidents in the United States, more than 443,000 of which have been fatal — an average of 110 fatalities per day. These statistics make traffic accidents one of the leading causes of death in this country, as well as worldwide.
Engineers have developed myriad safety systems aimed at preventing collisions: automated cruise control, a radar- or laser-based sensor system that slows a car when approaching another vehicle; blind-spot warning systems, which use lights or beeps to alert the driver to the presence of a vehicle he or she can’t see; and traction control and stability assist, which automatically apply the brakes if they detect skidding or a loss of steering control.
Still, more progress must be made to achieve the long-term goal of “intelligent transportation”: cars that can “see” and communicate with other vehicles on the road, making them able to prevent crashes virtually 100 percent of the time.
Of course, any intelligent transportation system (ITS), even one that becomes a mainstream addition to new cars, will have to contend with human-operated vehicles as long as older cars remain on the road — that is, for the foreseeable future. To this end, MIT mechanical engineers are working on a new ITS algorithm that takes into account models of human driving behavior to warn drivers of potential collisions, and ultimately takes control of the vehicle to prevent a crash.
The theory behind the algorithm and some experimental results will be published in the journal IEEE Robotics and Automation Magazine. The paper is co-authored by Rajeev Verma, who was a visiting PhD student at MIT this academic year, and Domitilla Del Vecchio, assistant professor of mechanical engineering and W. M. Keck Career Development Assistant Professor in Biomedical Engineering.
Avoiding the car that cried wolf
According to Del Vecchio, a common challenge for ITS developers is designing a system that is safe without being overly conservative. It’s tempting to treat every vehicle on the road as an “agent that’s playing against you,” she says, and construct hypersensitive systems that consistently react to worst-case scenarios. But with this approach, Del Vecchio says, “you get a system that gives you warnings even when you don’t feel them as necessary. Then you would say, ‘Oh, this warning system doesn’t work,’ and you would neglect it all the time.”
That’s where predicting human behavior comes in. Many other researchers have worked on modeling patterns of human driving. Following their lead, Del Vecchio and Verma reasoned that driving actions fall into two main modes: braking and accelerating. Depending on which mode a driver is in at a given moment, there is a finite set of possible places the car could be in the future, whether a tenth of a second later or a full 10 seconds later. This set of possible positions, combined with predictive models of human behavior — when and where drivers slow down or speed up around an intersection, for example — all went into building the new algorithm.
The result is a program that is able to compute, for any two vehicles on the road nearing an intersection, a “capture set,” or a defined area in which two vehicles are in danger of colliding. The ITS-equipped car then engages in a sort of game-theoretic decision, in which it uses information from its onboard sensors as well as roadside and traffic-light sensors to try to predict what the other car will do, reacting accordingly to prevent a crash.
When both cars are ITS-equipped, the “game” becomes a cooperative one, with both cars communicating their positions and working together to avoid a collision.
Steering clear of the ‘bad set’
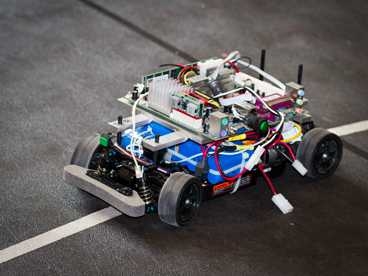
Del Vecchio and Verma tested their algorithm with a laboratory setup involving two miniature vehicles on overlapping circular tracks: one autonomous and one controlled by a human driver. Eight volunteers participated, to account for differences in individual driving styles. Out of 100 trials, there were 97 instances of collision avoidance. The vehicles entered the capture set three times; one of these times resulted in a collision.
In the three “failed” trials, Del Vecchio says the trouble was largely due to delays in communication between ITS vehicles and the workstation, which represents the roadside infrastructure that captures and transmits information about non-ITS-equipped cars. In these cases, one vehicle may be making decisions based on information about the position and speed of the other vehicle that is off by a fraction of a second. “So you may end up actually being in the capture set while the vehicles think you are not,” Del Vecchio says.
One way to handle this problem is to improve the communication hardware as much as possible, but the researchers say there will virtually always be delays, so their next step is to make the system robust to these delays — that is, to ensure that the algorithm is conservative enough to avoid a situation in which a communication delay could mean the difference between crashing and not crashing.
Jim Freudenberg, a professor of electrical and computer engineering at the University of Michigan, says that although it’s nearly impossible to correctly predict human behavior 100 percent of the time, Del Vecchio and Verma’s approach is promising. “Human-controlled technologies and computer-controlled technologies are coming more and more into contact with one other, and we have to have some way of making assumptions about the human — otherwise, you can’t do anything because of how conservative you have to be,” he says.
The researchers have already begun to test their system in full-size vehicles with human drivers; future work will focus on incorporating driver reaction-time data to refine when the system must actively take control of the car and when it can merely provide a passive warning to the driver. They are also working on algorithms that can account for up to eight vehicles at once, to prevent a situation in which slowing down or speeding up to avoid one car could actually cause a collision with another.
Eventually, the researchers also hope to build in sensors for weather and road conditions and take into account car-specific manufacturing details — all of which affect handling — to help their system make even better informed decisions.
Engineers have developed myriad safety systems aimed at preventing collisions: automated cruise control, a radar- or laser-based sensor system that slows a car when approaching another vehicle; blind-spot warning systems, which use lights or beeps to alert the driver to the presence of a vehicle he or she can’t see; and traction control and stability assist, which automatically apply the brakes if they detect skidding or a loss of steering control.
Still, more progress must be made to achieve the long-term goal of “intelligent transportation”: cars that can “see” and communicate with other vehicles on the road, making them able to prevent crashes virtually 100 percent of the time.
Of course, any intelligent transportation system (ITS), even one that becomes a mainstream addition to new cars, will have to contend with human-operated vehicles as long as older cars remain on the road — that is, for the foreseeable future. To this end, MIT mechanical engineers are working on a new ITS algorithm that takes into account models of human driving behavior to warn drivers of potential collisions, and ultimately takes control of the vehicle to prevent a crash.
The theory behind the algorithm and some experimental results will be published in the journal IEEE Robotics and Automation Magazine. The paper is co-authored by Rajeev Verma, who was a visiting PhD student at MIT this academic year, and Domitilla Del Vecchio, assistant professor of mechanical engineering and W. M. Keck Career Development Assistant Professor in Biomedical Engineering.
Avoiding the car that cried wolf
According to Del Vecchio, a common challenge for ITS developers is designing a system that is safe without being overly conservative. It’s tempting to treat every vehicle on the road as an “agent that’s playing against you,” she says, and construct hypersensitive systems that consistently react to worst-case scenarios. But with this approach, Del Vecchio says, “you get a system that gives you warnings even when you don’t feel them as necessary. Then you would say, ‘Oh, this warning system doesn’t work,’ and you would neglect it all the time.”
That’s where predicting human behavior comes in. Many other researchers have worked on modeling patterns of human driving. Following their lead, Del Vecchio and Verma reasoned that driving actions fall into two main modes: braking and accelerating. Depending on which mode a driver is in at a given moment, there is a finite set of possible places the car could be in the future, whether a tenth of a second later or a full 10 seconds later. This set of possible positions, combined with predictive models of human behavior — when and where drivers slow down or speed up around an intersection, for example — all went into building the new algorithm.
The result is a program that is able to compute, for any two vehicles on the road nearing an intersection, a “capture set,” or a defined area in which two vehicles are in danger of colliding. The ITS-equipped car then engages in a sort of game-theoretic decision, in which it uses information from its onboard sensors as well as roadside and traffic-light sensors to try to predict what the other car will do, reacting accordingly to prevent a crash.
When both cars are ITS-equipped, the “game” becomes a cooperative one, with both cars communicating their positions and working together to avoid a collision.
Steering clear of the ‘bad set’
Del Vecchio and Verma tested their algorithm with a laboratory setup involving two miniature vehicles on overlapping circular tracks: one autonomous and one controlled by a human driver. Eight volunteers participated, to account for differences in individual driving styles. Out of 100 trials, there were 97 instances of collision avoidance. The vehicles entered the capture set three times; one of these times resulted in a collision.
In the three “failed” trials, Del Vecchio says the trouble was largely due to delays in communication between ITS vehicles and the workstation, which represents the roadside infrastructure that captures and transmits information about non-ITS-equipped cars. In these cases, one vehicle may be making decisions based on information about the position and speed of the other vehicle that is off by a fraction of a second. “So you may end up actually being in the capture set while the vehicles think you are not,” Del Vecchio says.
One way to handle this problem is to improve the communication hardware as much as possible, but the researchers say there will virtually always be delays, so their next step is to make the system robust to these delays — that is, to ensure that the algorithm is conservative enough to avoid a situation in which a communication delay could mean the difference between crashing and not crashing.
Jim Freudenberg, a professor of electrical and computer engineering at the University of Michigan, says that although it’s nearly impossible to correctly predict human behavior 100 percent of the time, Del Vecchio and Verma’s approach is promising. “Human-controlled technologies and computer-controlled technologies are coming more and more into contact with one other, and we have to have some way of making assumptions about the human — otherwise, you can’t do anything because of how conservative you have to be,” he says.
The researchers have already begun to test their system in full-size vehicles with human drivers; future work will focus on incorporating driver reaction-time data to refine when the system must actively take control of the car and when it can merely provide a passive warning to the driver. They are also working on algorithms that can account for up to eight vehicles at once, to prevent a situation in which slowing down or speeding up to avoid one car could actually cause a collision with another.
Eventually, the researchers also hope to build in sensors for weather and road conditions and take into account car-specific manufacturing details — all of which affect handling — to help their system make even better informed decisions.