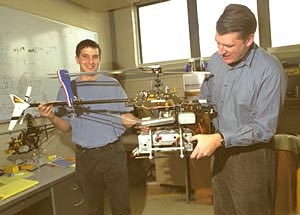
CAMBRIDGE, Mass. -- MIT researchers are creating the world's first acrobatic robotic bird -- a small, agile helicopter that the military could use in mountainous and urban combat and that could offer the entertainment industry a new means of capturing aerial imagery.
Late last year the team achieved the first-ever autonomous acrobatic maneuver with a helicopter. An X-Cell 60 model rotorcraft, equipped with a seven-pound instrumentation box, performed a 360-degree aileron roll (a corkscrew-like maneuver) at high speed, after which it leveled itself and continued to fly. The achievement was thanks to "a combination of judicious hardware choices, advanced modeling techniques and innovative control strategies," said team leader Eric Feron, a professor in the Department of Aeronautics and Astronautics and the Laboratory for Information and Decision Systems.
Previously, performing acrobatic maneuvers with helicopters -- large or small, manned or unmanned -- required the skill of an elite pilot. The MIT team believes their helicopter is the first to perform such stunts on its own. It does so at the flip of a switch on a remote control box.
EASY TO OPERATE
It is also easy to operate. While a pilot on the ground manually directs the machine through basic maneuvers like takeoff and landing (autonomous takeoff and landing have already been demonstrated by other researchers, including those at Draper Laboratories), the rest can be done by a person without any training. "Anyone can fly it. I can fly it. You can fly it," said Vlad Gavrilets, the aero-astro Ph.D. candidate primarily involved in the project.
Small, agile, robotic helicopters could provide a new means of military reconnaissance or weapons delivery in mountainous, urban and other challenging terrain off-limits to larger aircraft and too dangerous for manned aircraft. They could fly at low altitude in tight spaces between skyscrapers or locate a terrorist's cave in the mountains, sending live images to an aircraft carrier or to bombers in flight.
The helicopter's small size and potentially low cost make it especially appealing. The machine and all its gear can "fit in the trunk of a small car," says Gavrilets. The prototype cost about $40,000 to develop (excluding labor costs), but Gavrilets expects that a manufactured model used for filming aerial imagery would cost considerably less.
He added that for military purposes, the helicopter would have to have a range of at least several hundred miles and would thus be larger and cost more--probably around $500,000. Still, that's considerably less the $2 million price tag of the Predator, an unmanned airplane currently used for high-risk missions in Afghanistan.
MANY APPLICATIONS
The helicopter has non-military applications as well. For example, it could survey disaster sites too dangerous for manned operations. Thanks to its vibration isolation equipment, it could also give filmmakers a cheap, risk-free way to shoot aerial footage. Currently, says Gavrilets, "It costs $20,000 a day to rent a helicopter and a pilot for certain types of aerial shots."
While the vibration isolation system is primarily intended to protect the computer equipment inside the control box from malfunctioning, it can also keep a camera still. The result is blur-free footage from vantage points unique to a small aircraft. Gavrilets illustrated this at a recent talk at which he showed video captured with a small (pilot-operated) helicopter that he equipped with a vibration isolation system like the MIT X-Cell 60s. The footage, which showed a falcon's-eye view of fleeing pigeons in Central Park and the Bronx, was produced for an Emmy-winning 2000 National Geographic documentary about the life of pigeons in New York City.
The helicopter project began in 1998. Feron and his students outfitted a model helicopter with a small box containing inertial sensors, a GPS receiver, an altimeter and a computer. The loaded box, which couldn't weigh more than seven pounds for the helicopter to function properly, enabled the helicopter to record information during manual flight by a trained pilot. That information was used to create a computer simulation, from which the researchers developed the autonomous control software for the helicopter's on-board computer. Thus equipped, the helicopter can execute a complex, in-air maneuver autonomously.
The team hopes to follow the aileron roll with other complex acrobatic maneuvers. The next maneuver they aim to perform is a split S -- a half roll followed immediately by a half loop -- which is a method of reversing direction very quickly. To view videos of some of these maneuvers made manually by a pilot controlling the craft, plus the autonomous aileron roll, visit http://gewurtz.mit.edu/research/heli.htm.
Gavrilets (S.M. 1998 in aeronautics and astronautics) returned to MIT as a doctoral candidate in 2000 after working on several aircraft programs, including high-altitude drones for atmospheric research, unmanned combat aerial vehicles and some other experimental airplanes. He brings to MIT a unique experience in modeling and operating complex aircraft systems, which requires combined expertise in aircraft dynamics, mechanical vibrations, control systems and software engineering. However, says Gavrilets, "Helicopters are darn complicated. A lot more complicated than airplanes, even the most bizarre airplanes."
Several other students play key roles in the project. Post-doctoral associate Bernard Mettler is the team's expert in helicopter modeling and worked with Gavrilets on the complexities of modeling and control design. His book, "System Identification Modeling and Characteristics of Small-Scale Rotorcraft" (Kluwer Academic Publishers), will be published this year. Mettler teaches Course 16-399, Introduction to Rotorcraft Dynamics and Control.
Aero-astro M.S. candidate Ioannis Martinos conceived and designed the receiver and servo/interface board, "the most safety-critical part of the hardware," says Gavrilets. This equipment processes remote-control commands and manipulates the helicopter's controllers of factors such as pitch, angle and yaw as precisely as a pilot. "It has performed marvelously," says Gavrilets.
Much of the 12,000 lines of code necessary to fly the helicopter were written by Kara Sprague (M.Eng. 2002 in electrical engineering and computer science) and Alex Shterenberg (M.Eng. 2000 in electrical engineering and computer science).
"Our ultimate goal is to create the first robotic flying bird," said Feron. "This goal is now within reach," he adds, "thanks to MIT's fantastic students."
The work is funded by Draper Laboratory, NASA and the Office of Naval Research.