Creating and verifying stable AI-controlled systems in a rigorous and flexible way
Neural network controllers provide complex robots with stability guarantees, paving the way for the safer deployment of autonomous vehicles and industrial machines.
Neural network controllers provide complex robots with stability guarantees, paving the way for the safer deployment of autonomous vehicles and industrial machines.

The method uses language-based inputs instead of costly visual data to direct a robot through a multistep navigation task.
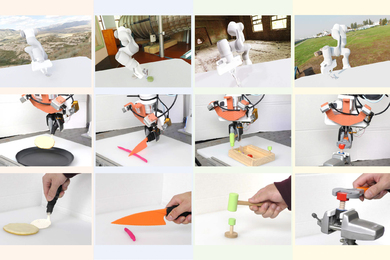
With generative AI models, researchers combined robotics data from different sources to help robots learn better.
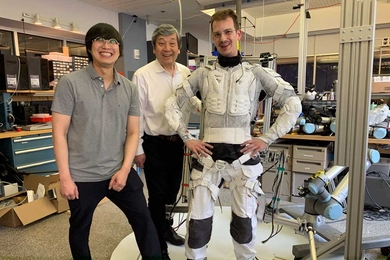
A new MIT system could help astronauts conserve energy and extend missions on the lunar surface.
A new algorithm learns to squish, bend, or stretch a robot’s entire body to accomplish diverse tasks like avoiding obstacles or retrieving items.
New modular, spring-like devices maximize the work of live muscle fibers so they can be harnessed to power biohybrid bots.
With help from a large language model, MIT engineers enabled robots to self-correct after missteps and carry on with their chores.

In class 2.679 (Electronics for Mechanical Systems II) a hands-on approach provides the skills engineers use to create and solve problems.
Faster and more accurate than some alternatives, this approach could be useful for robots that interact with humans or work in tight spaces.
The “oriented” samples, the first of their kind from any planet, could shed light on Mars’ ancient magnetic field.

By breaking an intractable problem into smaller chunks, a deep-learning technique identifies the optimal areas for thinning out traffic in a warehouse.

From robotics to dance, the MIT senior has made it his mission to explore as many new experiences as possible at the Institute.
MIT CSAIL researchers established new connections between combinatorial and continuous optimization, which can find global solutions for complex motion-planning puzzles.

Human Guided Exploration (HuGE) enables AI agents to learn quickly with some help from humans, even if the humans make mistakes.

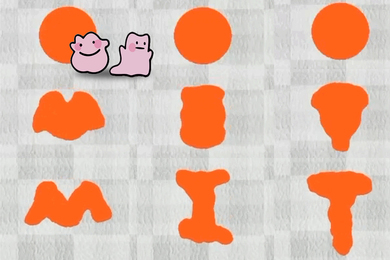
Computer vision enables contact-free 3D printing, letting engineers print with high-performance materials they couldn’t use before.