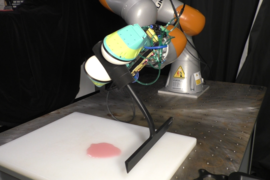
Before a robot can grab dishes off a shelf to set the table, it must ensure its gripper and arm won’t crash into anything and potentially shatter the fine china. As part of its motion planning process, a robot typically runs “safety check” algorithms that verify its trajectory is collision-free.
However, sometimes these algorithms generate false positives, claiming a trajectory is safe when the robot would actually collide with something. Other methods that can avoid false positives are typically too slow for robots in the real world.
Now, MIT researchers have developed a safety check technique which can prove with 100 percent accuracy that a robot’s trajectory will remain collision-free (assuming the model of the robot and environment is itself accurate). Their method, which is so precise it can discriminate between trajectories that differ by only millimeters, provides proof in only a few seconds.
But a user doesn’t need to take the researchers’ word for it — the mathematical proof generated by this technique can be checked quickly with relatively simple math.
The researchers accomplished this using a special algorithmic technique, called sum-of-squares programming, and adapted it to effectively solve the safety check problem. Using sum-of-squares programming enables their method to generalize to a wide range of complex motions.
This technique could be especially useful for robots that must move rapidly avoid collisions in spaces crowded with objects, such as food preparation robots in a commercial kitchen. It is also well-suited for situations where robot collisions could cause injuries, like home health robots that care for frail patients.
“With this work, we have shown that you can solve some challenging problems with conceptually simple tools. Sum-of-squares programming is a powerful algorithmic idea, and while it doesn’t solve every problem, if you are careful in how you apply it, you can solve some pretty nontrivial problems,” says Alexandre Amice, an electrical engineering and computer science (EECS) graduate student and lead author of a paper on this technique.
Amice is joined on the paper fellow EECS graduate student Peter Werner and senior author Russ Tedrake, the Toyota Professor of EECS, Aeronautics and Astronautics, and Mechanical Engineering, and a member of the Computer Science and Artificial Intelligence Laboratory (CSAIL). The work will be presented at the International Conference on Robots and Automation.
Certifying safety
Many existing methods that check whether a robot’s planned motion is collision-free do so by simulating the trajectory and checking every few seconds to see whether the robot hits anything. But these static safety checks can’t tell if the robot will collide with something in the intermediate seconds.
This might not be a problem for a robot wandering around an open space with few obstacles, but for robots performing intricate tasks in small spaces, a few seconds of motion can make an enormous difference.
Conceptually, one way to prove that a robot is not headed for a collision would be to hold up a piece of paper that separates the robot from any obstacles in the environment. Mathematically, this piece of paper is called a hyperplane. Many safety check algorithms work by generating this hyperplane at a single point in time. However, each time the robot moves, a new hyperplane needs to be recomputed to perform the safety check.
Instead, this new technique generates a hyperplane function that moves with the robot, so it can prove that an entire trajectory is collision-free rather than working one hyperplane at a time.
The researchers used sum-of-squares programming, an algorithmic toolbox that can effectively turn a static problem into a function. This function is an equation that describes where the hyperplane needs to be at each point in the planned trajectory so it remains collision-free.
Sum-of-squares can generalize the optimization program to find a family of collision-free hyperplanes. Often, sum-of-squares is considered a heavy optimization that is only suitable for offline use, but the researchers have shown that for this problem it is extremely efficient and accurate.
“The key here was figuring out how to apply sum-of-squares to our particular problem. The biggest challenge was coming up with the initial formulation. If I don’t want my robot to run into anything, what does that mean mathematically, and can the computer give me an answer?” Amice says.
In the end, like the name suggests, sum-of-squares produces a function that is the sum of several squared values. The function is always positive, since the square of any number is always a positive value.
Trust but verify
By double-checking that the hyperplane function contains squared values, a human can easily verify that the function is positive, which means the trajectory is collision-free, Amice explains.
While the method certifies with perfect accuracy, this assumes the user has an accurate model of the robot and environment; the mathematical certifier is only as good as the model.
“One really nice thing about this approach is that the proofs are really easy to interpret, so you don’t have to trust me that I coded it right because you can check it yourself,” he adds.
They tested their technique in simulation by certifying that complex motion plans for robots with one and two arms were collision-free. At its slowest, their method took just a few hundred milliseconds to generate a proof, making it much faster than some alternate techniques.
“This new result suggests a novel approach to certifying that a complex trajectory of a robot manipulator is collision free, elegantly harnessing tools from mathematical optimization, turned into surprisingly fast (and publicly available) software. While not yet providing a complete solution to fast trajectory planning in cluttered environments, this result opens the door to several intriguing directions of further research,” says Dan Halperin, a professor of computer science at Tel Aviv University, who was not involved with this research.
While their approach is fast enough to be used as a final safety check in some real-world situations, it is still too slow to be implemented directly in a robot motion planning loop, where decisions need to be made in microseconds, Amice says.
The researchers plan to accelerate their process by ignoring situations that don’t require safety checks, like when the robot is far away from any objects it might collide with. They also want to experiment with specialized optimization solvers that could run faster.
“Robots often get into trouble by scraping obstacles due to poor approximations that are made when generating their routes. Amice, Werner, and Tedrake have come to the rescue with a powerful new algorithm to quickly ensure that robots never overstep their bounds, by carefully leveraging advanced methods from computational algebraic geometry,” adds Steven LaValle, professor in the Faculty of Information Technology and Electrical Engineering at the University of Oulu in Finland, and who was not involved with this work.
This work was supported, in part, by Amazon and the U.S. Air Force Research Laboratory.