
SMART launches research group to advance AI, automation, and the future of work
Mens, Manus and Machina (M3S) will design technology, training programs, and institutions for successful human-machine collaboration.
Mens, Manus and Machina (M3S) will design technology, training programs, and institutions for successful human-machine collaboration.
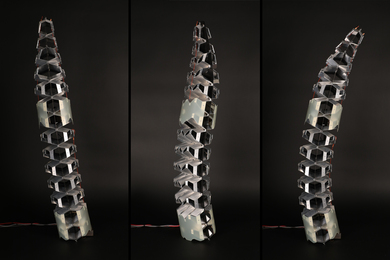
Produced with techniques borrowed from Japanese paper-cutting, the strong metal lattices are lighter than cork and have customizable mechanical properties.

Researchers develop a machine-learning technique that can efficiently learn to control a robot, leading to better performance with fewer data.
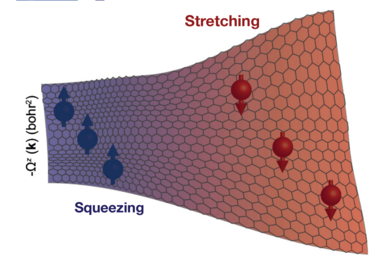
Researchers discover how to control the anomalous Hall effect and Berry curvature to create flexible quantum magnets for use in computers, robotics, and sensors.

A new technique helps a nontechnical user understand why a robot failed, and then fine-tune it with minimal effort to perform a task effectively.
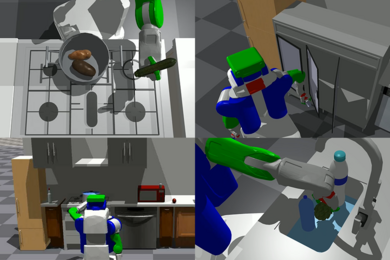
PIGINet leverages machine learning to streamline and enhance household robots' task and motion planning, by assessing and filtering feasible solutions in complex environments.

Luca Carlone and Jonathan How of MIT LIDS discuss how future robots might perceive and interact with their environment.
New soft-bodied robots that can be controlled by a simple magnetic field are well suited to work in confined spaces.
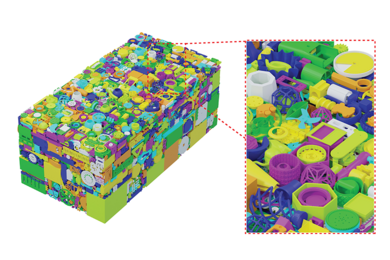
A new computational method facilitates the dense placement of objects inside a rigid container.


Global participation in MIT RAISE’s free K-12 program more than doubles in its second year.
New online journal seeks to bring together the MIT community to discuss the social responsibilities of individuals who design, implement, and evaluate technologies.
A new AI-based approach for controlling autonomous robots satisfies the often-conflicting goals of safety and stability.
Students learn about the complexity behind simple, everyday movement before experimenting with mechanical models.

Researchers create a new simulation tool for robots to manipulate complex fluids in a step toward helping them more effortlessly assist with daily tasks.