
A faster way to estimate AI power consumption
The “EnergAIzer” method generates reliable results in seconds, enabling data center operators to efficiently allocate resources and reduce wasted energy.
The “EnergAIzer” method generates reliable results in seconds, enabling data center operators to efficiently allocate resources and reduce wasted energy.
New dataset of 30,000-plus competition math problems from 47 countries gives AI researchers a harder test — and students worldwide a better training ground.
A new training method improves the reliability of AI confidence estimates without sacrificing performance, addressing a root cause of hallucination in reasoning models.
The associate professors of EECS and chemistry, respectively, are honored for exceptional contributions to teaching, research, and service at MIT.
Founded by Tristan Bepler PhD ’20 and former MIT professor Tim Lu PhD ’07, OpenProtein.AI offers researchers open-source models and other tools for protein engineering.

Researchers are developing hardware and algorithms to improve collaboration between divers and autonomous underwater vehicles engaged in maritime missions.

Researchers use control theory to shed unnecessary complexity from AI models during training, cutting compute costs without sacrificing performance.

Researchers developed a system that intelligently balances workloads to improve the efficiency of flash storage hardware in a data center.

Dean Price, assistant professor in the Department of Nuclear Science and Engineering, sees a bright future for nuclear power, and believes AI can help us realize that vision.
MIT researchers developed a testing framework that pinpoints situations where AI decision-support systems are not treating people and communities fairly.
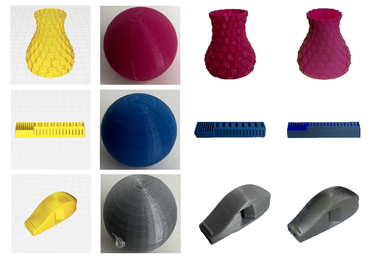
By quickly generating aesthetically accurate previews of fabricated objects, the VisiPrint system could make prototyping faster and less wasteful.

Computational biologist Sergei Kotelnikov is working to develop new methods in protein modeling as part of the School of Science Dean’s Postdoctoral Fellowship.

A new model measures defects that can be leveraged to improve materials’ mechanical strength, heat transfer, and energy-conversion efficiency.

This new approach adapts to decide which robots should get the right of way at every moment, avoiding congestion and increasing throughput.

MIT Sea Grant works with the Woodwell Climate Research Center and other collaborators to demonstrate a deep learning-based system for fish monitoring.