
A faster way to estimate AI power consumption
The “EnergAIzer” method generates reliable results in seconds, enabling data center operators to efficiently allocate resources and reduce wasted energy.
The “EnergAIzer” method generates reliable results in seconds, enabling data center operators to efficiently allocate resources and reduce wasted energy.
New dataset of 30,000-plus competition math problems from 47 countries gives AI researchers a harder test — and students worldwide a better training ground.

Ultra-efficient chip design enables extremely strong cryptography algorithms to run on energy-constrained edge devices.
The prestigious honor society honors four MIT faculty and 13 additional MIT alumni among more than 250 new members.
A new training method improves the reliability of AI confidence estimates without sacrificing performance, addressing a root cause of hallucination in reasoning models.
The associate professors of EECS and chemistry, respectively, are honored for exceptional contributions to teaching, research, and service at MIT.
Two faculty and six additional alumni win top APS awards and prizes; four faculty and 12 additional alumni named APS Fellows.

Researchers are developing hardware and algorithms to improve collaboration between divers and autonomous underwater vehicles engaged in maritime missions.

The influential first leader of the Computation Structures Group at MIT played a key role in the development of asynchronous computing.

Researchers use control theory to shed unnecessary complexity from AI models during training, cutting compute costs without sacrificing performance.

Graduate engineering program is No. 1 in the nation; MIT Sloan is No. 6.

Researchers developed a system that intelligently balances workloads to improve the efficiency of flash storage hardware in a data center.

Co-founded by Dan Sobek ’88, SM ’92, PhD ’97, 1s1 Energy has developed electrochemical cell materials for hydrogen electrolyzers that it says reduces energy use by 30 percent.
MIT researchers developed a testing framework that pinpoints situations where AI decision-support systems are not treating people and communities fairly.
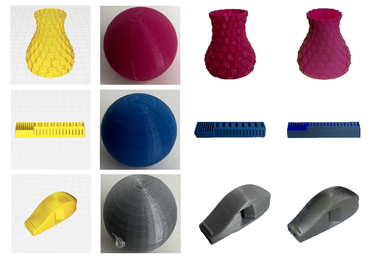
By quickly generating aesthetically accurate previews of fabricated objects, the VisiPrint system could make prototyping faster and less wasteful.