Teaching AI agents to ask better questions by playing “Battleship”
MIT researchers use the classic game as a test bed for AI agents, finding a small AI model can outperform the biggest ones at 1 percent of the cost.
Download RSS feed: News Articles / In the Media / Audio
MIT researchers use the classic game as a test bed for AI agents, finding a small AI model can outperform the biggest ones at 1 percent of the cost.

Torralba’s research focuses on computer vision, machine learning, and human visual perception.

With support from the Siegel Family Endowment, the newly renamed MIT Siegel Family Quest for Intelligence investigates how brains produce intelligence and how it can be replicated to solve problems.

The “self-steering” DisCIPL system directs small models to work together on tasks with constraints, like itinerary planning and budgeting.
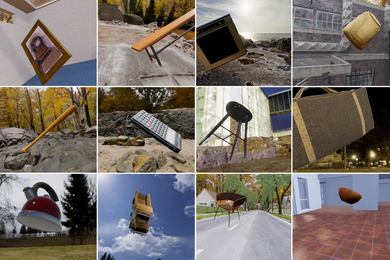
By visualizing Escher-like optical illusions in 2.5 dimensions, the “Meschers” tool could help scientists understand physics-defying shapes and spark new designs.
Language models follow changing situations using clever arithmetic, instead of sequential tracking. By controlling when these approaches are used, engineers could improve the systems’ capabilities.
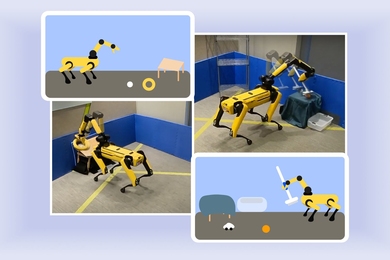
Researchers developed an algorithm that lets a robot “think ahead” and consider thousands of potential motion plans simultaneously.
New research using computational vision models suggests the brain’s “ventral stream” might be more versatile than previously thought.

The “PRoC3S” method helps an LLM create a viable action plan by testing each step in a simulation. This strategy could eventually aid in-home robots to complete more ambiguous chore requests.

The MIT sophomore and award-winning memory champion explains what these competitions are all about and why you might want to build a “memory palace.”

By allowing users to clearly see data referenced by a large language model, this tool speeds manual validation to help users spot AI errors.
A new algorithm helps robots practice skills like sweeping and placing objects, potentially helping them improve at important tasks in houses, hospitals, and factories.
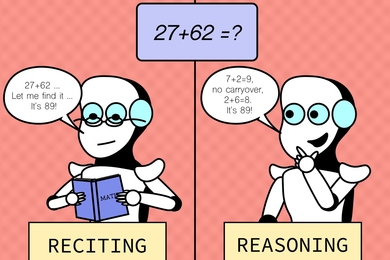
New CSAIL research highlights how LLMs excel in familiar scenarios but struggle in novel ones, questioning their true reasoning abilities versus reliance on memorization.

Three neurosymbolic methods help language models find better abstractions within natural language, then use those representations to execute complex tasks.

The MIT Schwarzman College of Computing building will form a new cluster of connectivity across a spectrum of disciplines in computing and artificial intelligence.