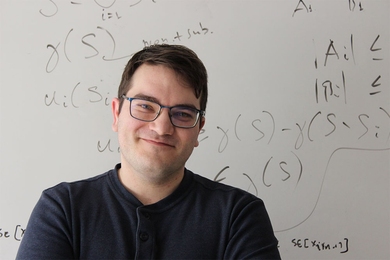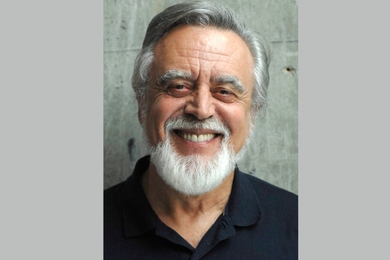
Professor Emeritus Dimitri Bertsekas, influential computer scientist and prolific author, dies at 83
Known for his clear and elegant writing style, Bertsekas shaped fields from control and optimization to large-scale computation and artificial intelligence.