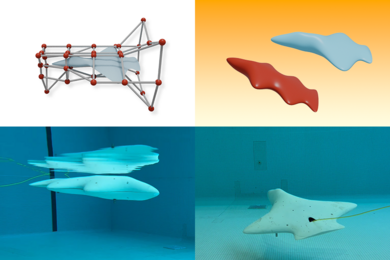
An AI pipeline developed by CSAIL researchers enables unique hydrodynamic designs for bodyboard-sized vehicles that glide underwater and could help scientists gather marine data.
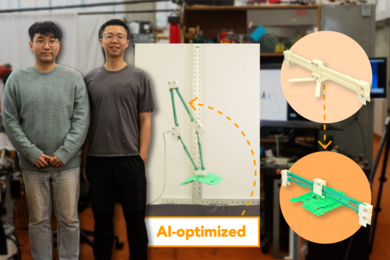
MIT CSAIL researchers combined GenAI and a physics simulation engine to refine robot designs. The result: a machine that out-jumped a robot designed by humans.
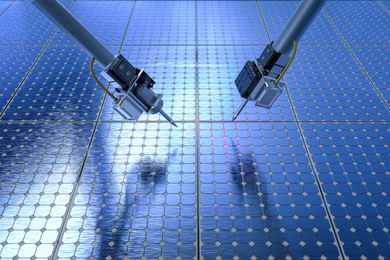
The alumni-founded startup Nominal has built a platform for building and testing complex systems like fighter jets, nuclear reactors, rockets, and robots.
Composed of “computing bilinguals,” the Undergraduate Advisory Group provides vital input to help advance the mission of the MIT Schwarzman College of Computing.
A new framework from the MIT-IBM Watson AI Lab supercharges language models, so they can reason over, interactively develop, and verify valid, complex travel agendas.
Founded by two former regulars at the MITERS makerspace, the company has built huge, rugged drones to more safely and sustainably apply fertilizers and pesticides on farms.
SketchAgent, a drawing system developed by MIT CSAIL researchers, sketches up concepts stroke-by-stroke, teaching language models to visually express concepts on their own and collaborate with humans.
The fellowships recognize doctoral students who have “the extraordinary creativity and principled leadership necessary to tackle problems others can’t solve.”