MIT Environmental Solutions Initiative Research Program Director Marcela Angel MCP ’18 has built an international program in natural climate solutions.
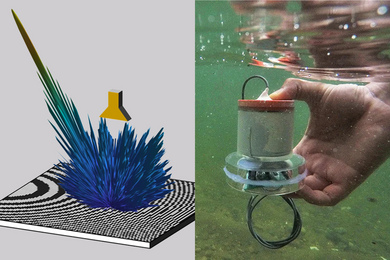
Researchers create a new simulation tool for robots to manipulate complex fluids in a step toward helping them more effortlessly assist with daily tasks.