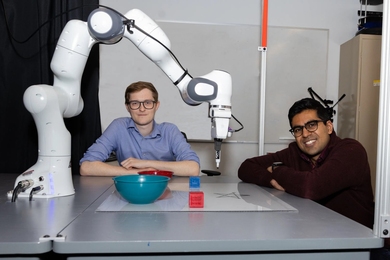
The “PRoC3S” method helps an LLM create a viable action plan by testing each step in a simulation. This strategy could eventually aid in-home robots to complete more ambiguous chore requests.
MIT CSAIL director and EECS professor named a co-recipient of the honor for her robotics research, which has expanded our understanding of what a robot can be.
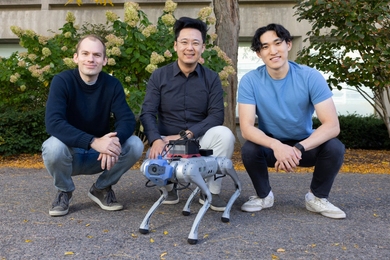
MIT CSAIL researchers used AI-generated images to train a robot dog in parkour, without real-world data. Their LucidSim system demonstrates generative AI's potential for creating robotics training data.
The Certificate in Aerospace Innovation gives students the tools and confidence to be aerospace entrepreneurs during an inflection point in the industry.