

Muscles are remarkably effective systems for generating controlled force, and engineers developing hardware for robots or prosthetics have long struggled to create analogs that can approach their unique combination of strength, rapid response, scalability, and control. But now, researchers at the MIT Media Lab and Politecnico di Bari in Italy have developed artificial muscle fibers that come closer to matching many of these qualities.
Like the fibers that bundle together to form biological muscles, these fibers can be arranged in different configurations to meet the demands of a given task. Unlike conventional robotic actuation systems, they are compliant enough to interface comfortably with the human body and operate silently without motors, external pumps, or other bulky supporting hardware.
The new electrofluidic fiber muscles — electrically driven actuators built in fiber format — are described in a recent paper published in Science Robotics. The work is led by Media Lab PhD candidate Ozgun Kilic Afsar; Vito Cacucciolo, a professor at the Politecnico di Bari; and four co-authors.

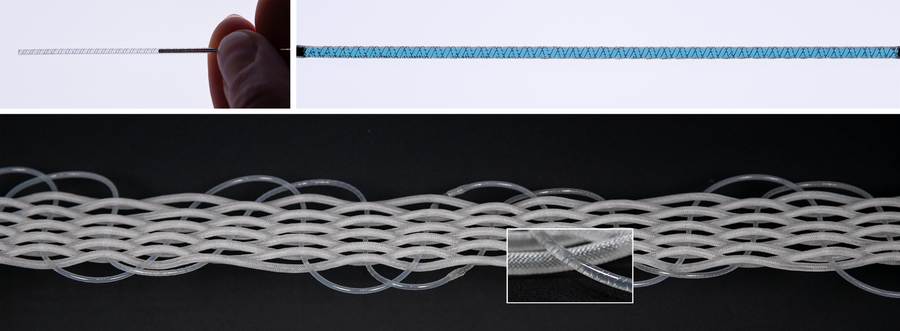
The new system brings together two technologies, Afsar explains. One is a fluidically driven artificial muscle known as a thin McKibben actuator, and the other is a miniaturized solid-state pump based on electrohydrodynamics (EHD), which can generate pressure inside a sealed fluid compartment without moving parts or an external fluid supply.
Until now, most fluid-driven soft actuators have relied on external “heavy, bulky, oftentimes noisy hydraulic infrastructure,” Afsar says, “which makes them difficult to integrate into systems where mobility or compact, lightweight design is important.” This has created a fundamental bottleneck in the practical use of fluidic actuators in real-world applications.
The key to breaking through that bottleneck was the use of integrated pumps based on electrohydrodynamic principles. These millimeter-scale, electrically driven pumps generate pressure and flow by injecting charge into a dielectric fluid, creating ions that drag the fluid along with them. Weighing just a few grams each and not much thicker than a toothpick, they can be fabricated continuously and scaled easily. “We integrated these fiber pumps into a closed fluidic circuit with the thin McKibben actuators,” Afsar says, noting that this was not a simple task given the different dynamics of the two components.
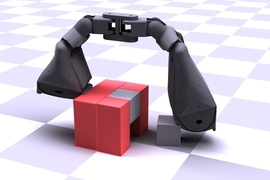
A key design strategy was to pair these fibers in what are known as antagonistic configurations. Cacucciolo explains that this is where “one muscle contracts while another elongates,” as when you bend your arm and your biceps contract while your triceps stretch. In their system, a millimeter-scale fiber pump sits between two similarly scaled McKibben actuators, driving fluid into one actuator to contract it while simultaneously relaxing the other.
“This is very much reminiscent of how biological muscles are configured and organized,” Afsar says. “We didn’t choose this configuration simply for the sake of biomimicry, but because we needed a way to store the fluid within the muscle design.” The need for an external reservoir open to the atmosphere has been one of the main factors limiting the practical use of EHD pumps in robotic systems outside the lab. By pairing two McKibben fibers in line, with a fiber pump between them to form a closed circuit, the team eliminated that need entirely.
Another key finding was that the muscle fibers needed to be pre-pressurized, rather than simply filled. “There is a minimum internal system pressure that the system can tolerate,” Afsar says, “below which the pump can degrade or temporarily stop working.” This happens because of cavitation, in which vapor bubbles form when the pressure at the pump inlet drops below the vapor pressure of the liquid, eventually leading to dielectric breakdown.
To prevent cavitation, they applied a “bias” pressure from the outset so that the pressure at the fiber pump inlet never falls below the liquid’s vapor pressure. The magnitude of this bias pressure can be adjusted depending on the application. “To achieve the maximum contraction the muscle can generate, we found there is a specific bias pressure range that is optimal,” she says. “If you want to configure the system for faster response, you might increase that bias pressure, though with some reduction in maximum contraction.”
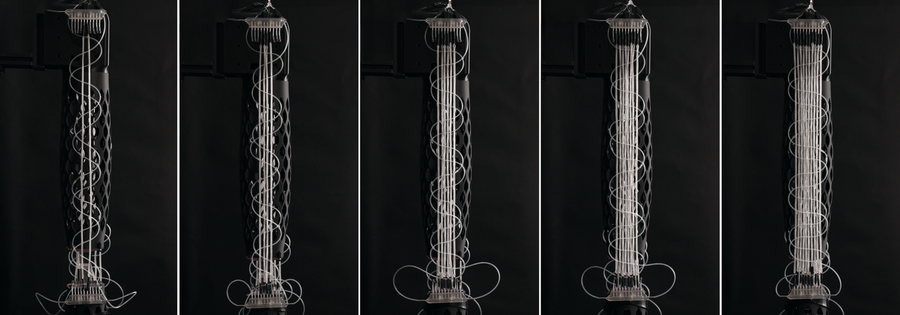
Cacucciolo adds that most of today’s robotic limbs and hands are built around electric servo motors, whose configuration differs fundamentally from that of natural muscles. Servo motors generate rotational motion on a shaft that must be converted into linear movement, whereas muscle fibers naturally contract and extend linearly, as do these electrofluidic fibers.
“Most robotic arms and humanoid robots are designed around the servo motors that drive them,” he says. “That creates integration constraints, because servo motors are hard to package densely and tend to concentrate mass near the joints they drive. By contrast, artificial muscles in fiber form can be packed tightly inside a robot or exoskeleton and distributed throughout the structure, rather than concentrated near a joint.”
These electrofluidic muscles may be especially useful for wearable applications, such as exoskeletons that help a person lift heavier loads or assistive devices that restore or augment dexterity. But the underlying principles could also apply more broadly. “Our findings extend to fluid-driven robotic systems in general,” Cacucciolo says. “Wherever fluidic actuators are used, or where engineers want to replace external pumps with internal ones, these design principles could apply across a wide range of fluid-driven robotic systems.”
This work “presents a major advancement in fiber-format soft actuation,” which “addresses several long-standing hurdles in the field, particularly regarding portability and power density,” says Herbert Shea, a professor in the Soft Transducers Laboratory at Ecole Polytechnique Federale de Lausanne in Switzerland, who was not associated with this research. “The lack of moving parts in the pump makes these muscles silent, a major advantage for prosthetic devices and assistive clothing,” he says.
Shea adds that “this high-quality and rigorous work bridges the gap between fundamental fluid dynamics and practical robotic applications. The authors provide a complete system-level solution — characterizing the individual components, developing a predictive physical model, and validating it through a range of demonstrators.”
In addition to Afsar and Cacucciolo, the team also included Gabriele Pupillo and Gennaro Vitucci at Politecnico di Bari and Wedyan Babatain and Professor Hiroshi Ishii at the MIT Media Lab. The work was supported by the European Research Council and the Media Lab’s multi-sponsored consortium.