
The United States population is older than it has ever been. Today, the country’s median age is 38.9, which is nearly a decade older than it was in 1980. And the number of adults older than 65 is expected to balloon from 58 million to 82 million by 2050. The challenge of caring for the elderly, amid shortages in care workers, rising health care costs, and evolving family structures, is an increasingly urgent societal issue.
To help address the eldercare challenge, a team of MIT engineers is looking to robotics. They have built and tested the Elderly Bodily Assistance Robot, or E-BAR, a mobile robot designed to physically support the elderly and prevent them from falling as they move around their homes.
E-BAR acts as a set of robotic handlebars that follows a person from behind. A user can walk independently or lean on the robot’s arms for support. The robot can support the person’s full weight, lifting them from sitting to standing and vice versa along a natural trajectory. And the arms of the robot can catch them by rapidly inflating side airbags if they begin to fall.
With their design, the researchers hope to prevent falls, which today are the leading cause of injury in adults who are 65 and older.
“Many older adults underestimate the risk of fall and refuse to use physical aids, which are cumbersome, while others overestimate the risk and may not exercise, leading to declining mobility,” says Harry Asada, the Ford Professor of Engineering at MIT. “Our design concept is to provide older adults having balance impairment with robotic handlebars for stabilizing their body. The handlebars go anywhere and provide support anytime, whenever they need.”
In its current version, the robot is operated via remote control. In future iterations, the team plans to automate much of the bot’s functionality, enabling it to autonomously follow and physically assist a user. The researchers are also working on streamlining the device to make it slimmer and more maneuverable in small spaces.
“I think eldercare is the next great challenge,” says E-BAR designer Roberto Bolli, a graduate student in the MIT Department of Mechanical Engineering. “All the demographic trends point to a shortage of caregivers, a surplus of elderly persons, and a strong desire for elderly persons to age in place. We see it as an unexplored frontier in America, but also an intrinsically interesting challenge for robotics.”
Bolli and Asada will present a paper detailing the design of E-BAR at the IEEE Conference on Robotics and Automation (ICRA) later this month.
Asada’s group at MIT develops a variety of technologies and robotic aides to assist the elderly. In recent years, others have developed fall prediction algorithms, designed robots and automated devices including robotic walkers, wearable, self-inflating airbags, and robotic frames that secure a person with a harness and move with them as they walk.
In designing E-BAR, Asada and Bolli aimed for a robot that essentially does three tasks: providing physical support, preventing falls, and safely and unobtrusively moving with a person. What’s more, they looked to do away with any harness, to give a user more independence and mobility.
“Elderly people overwhelmingly do not like to wear harnesses or assistive devices,” Bolli says. “The idea behind the E-BAR structure is, it provides body weight support, active assistance with gait, and fall catching while also being completely unobstructed in the front. You can just get out anytime.”
The team looked to design a robot specifically for aging in place at home or helping in care facilities. Based on their interviews with older adults and their caregivers, they came up with several design requirements, including that the robot must fit through home doors, allow the user to take a full stride, and support their full weight to help with balance, posture, and transitions from sitting to standing.
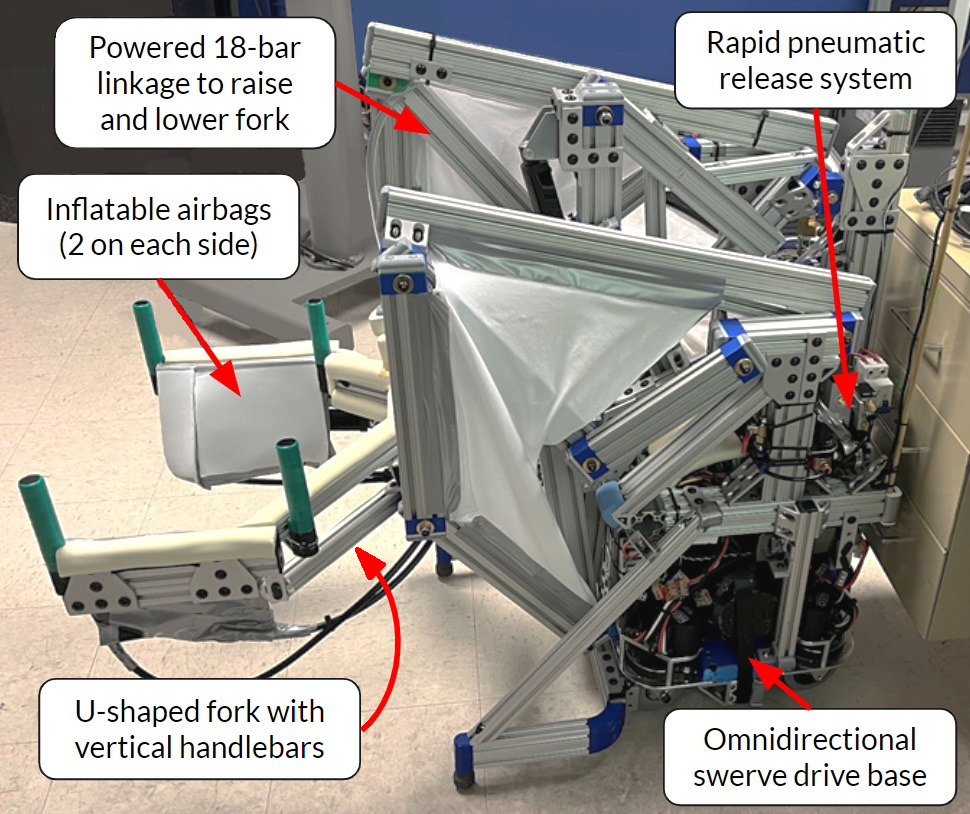
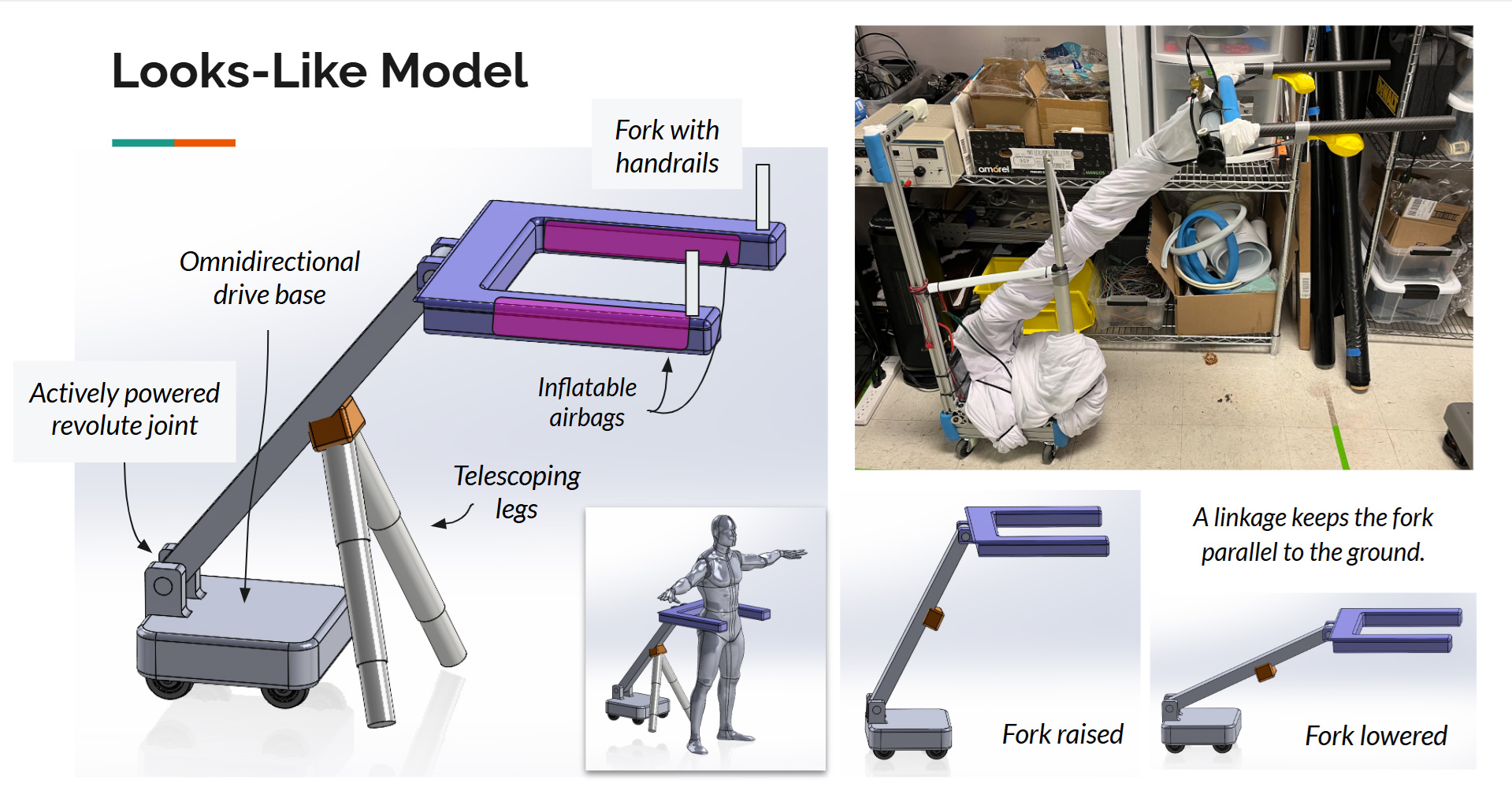
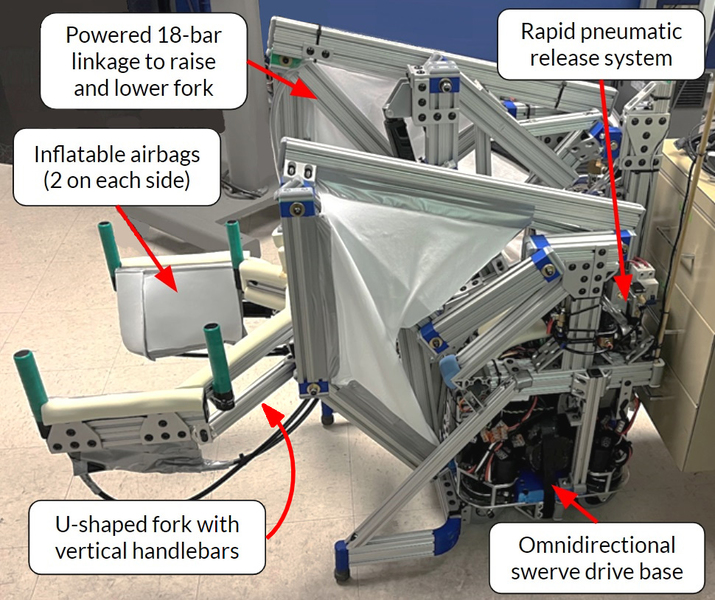
The robot consists of a heavy, 220-pound base whose dimensions and structure were optimized to support the weight of an average human without tipping or slipping. Underneath the base is a set of omnidirectional wheels that allows the robot to move in any direction without pivoting, if needed. (Imagine a car’s wheels shifting to slide into a space between two other cars, without parallel parking.)
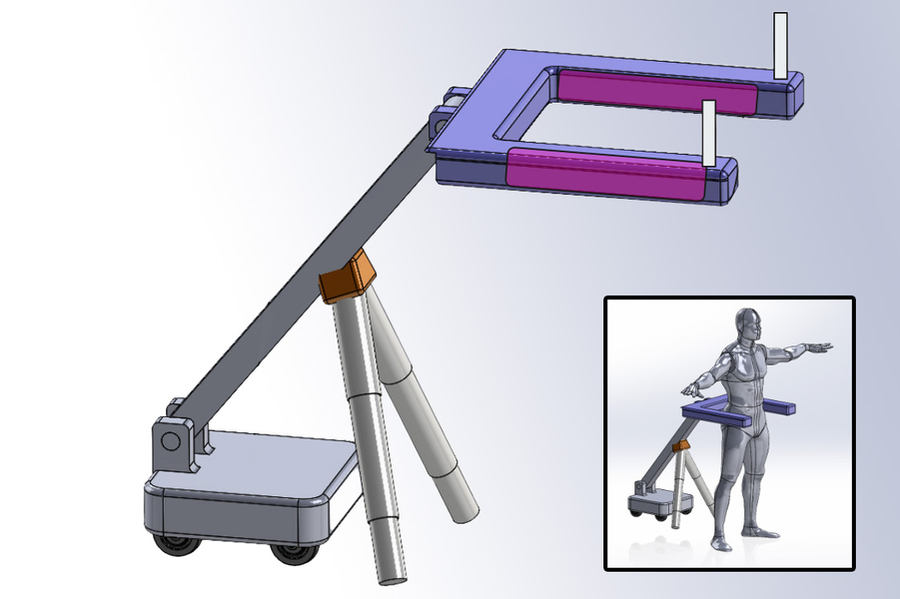
Extending out from the robot’s base is an articulated body made from 18 interconnected bars, or linkages, that can reconfigure like a foldable crane to lift a person from a sitting to standing position, and vice versa. Two arms with handlebars stretch out from the robot in a U-shape, which a person can stand between and lean against if they need additional support. Finally, each arm of the robot is embedded with airbags made from a soft yet grippable material that can inflate instantly to catch a person if they fall, without causing bruising on impact. The researchers believe that E-BAR is the first robot able to catch a falling person without wearable devices or use of a harness.
They tested the robot in the lab with an older adult who volunteered to use the robot in various household scenarios. The team found that E-BAR could actively support the person as they bent down to pick something up from the ground and stretched up to reach an object off a shelf — tasks that can be challenging to do while maintaining balance. The robot also was able to lift the person up and over the lip of a tub, simulating the task of getting out of a bathtub.
Bolli envisions a design like E-BAR would be ideal for use in the home by elderly people who still have a moderate degree of muscle strength but require assistive devices for activities of daily living.
“Seeing the technology used in real-life scenarios is really exciting,” says Bolli.
In their current paper, the researchers did not incorporate any fall-prediction capabilities in E-BAR’s airbag system. But another project in Asada’s lab, led by graduate student Emily Kamienski, has focused on developing algorithms with machine learning to control a new robot in response to the user’s real-time fall risk level.
Alongside E-BAR, Asada sees different technologies in his lab as providing different levels of assistance for people at certain phases of life or mobility.
“Eldercare conditions can change every few weeks or months,” Asada says. “We’d like to provide continuous and seamless support as a person’s disability or mobility changes with age.”
This work was supported, in part, by the National Robotics Initiative and the National Science Foundation.