To a robot designer like Sangbae Kim, the animal kingdom is full of inspiration.
"I always look at animals and ask why they are the way they are," says Kim, an assistant professor of mechanical engineering at MIT. "As an engineer, looking at them and speculating is fascinating."
While a graduate student at Stanford, Kim drew inspiration from the gecko to build a climbing robot, and he is now designing a running robot that mimics the movements of a cheetah. Such agile, fast-moving robots could perform military surveillance and search-and-rescue missions deemed too dangerous for humans to undertake.
His Biomimetic Robotics Lab is one of several at MIT pursuing biologically inspired engineering. A team of mechanical engineers has built robotic fish, and materials scientists have designed moisture-collecting materials that mimic a beetle's shell.
Evolution has produced finely tuned adaptations over millions of years, so it only makes sense to turn to nature for design ideas. However, while Kim seeks inspiration in nature, he's not trying to produce exact robotic copies of a particular animal. Such copying would be difficult to achieve and not necessarily the most effective design strategy.
"There are millions of things that animals have to adapt for, and it is almost impossible to compare evolution to our engineering/mathematical optimization process," says Kim. "And you have to be careful about copying other features that may not be related to the particular function you want to achieve. Therefore, extracting scientific principle is extremely important for designers like me."
Stickybot
When Kim and his colleagues at Stanford set out to build a climbing robot, at first they figured they needed to make the robot's feet sticky. However, they soon realized that very sticky feet can't detach very easily.
Their approach shifted dramatically with the 2006 discovery, by Lewis and Clark College biologist Kellar Autumn, that geckos use a phenomenon called directional adhesion to stick to walls.
"The gecko gave us a completely new perspective. Stickiness does not necessarily come from chemical composition; it can come from mechanical properties and geometry," says Kim. "The geometry enables strange phenomena such as directional adhesion, which sticks in only one direction."
The pads of a gecko's feet are covered with a forest of tiny hairs called setae, some of which are one-twentieth the width of a human hair. The setae, in turn, branch into hundreds of tiny smaller hairs called spatulae, which are about one-thousandth the width of a human hair. These hairs cling to surfaces using tiny molecular interactions known as van der Waals forces. Collectively, the forces are strong enough to support the gecko's weight as it scrambles up a vertical surface.
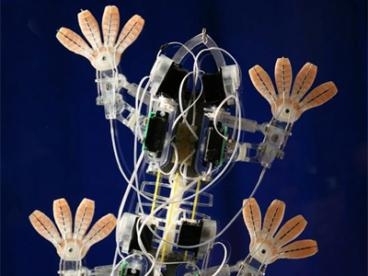
To demonstrate, Kim rummages around in a desk drawer in his office and pulls out a small rectangle of the gecko-inspired adhesive material, which resembles a tiny patch of blue Astroturf. A compact disc gently held against the horizontal surface attaches securely in one direction and then easily detaches in the opposite direction.
The adhesive is covered with hairs made of rubber silicone, which are thicker than those on a gecko's paw (about four times thicker than a human hair). Because thicker hairs require smoother surfaces for adhesion, Stickybot can only climb extremely smooth surfaces like glass.
Kim and his colleagues, led by Stanford professor Mark Cutkosky, first demonstrated Stickybot in 2006, and Time magazine named it one of that year's best inventions. The paper describing the robot also won the 2008 Best Paper Award for the IEEE Transactions on Robotics.
Potential applications for the stickybot technology include exterior repair of underwater oil pipelines and window washing. Kim also plans to start designing climbing equipment for humans using the directional adhesion technology.
Need for speed
Kim, who arrived at MIT as an assistant professor in June, is now turning his attention to a speedier robot, inspired by the cheetah. Four graduate students have just begun working on the cheetah project, and within the next two years Kim hopes to have a prototype that can run 35 miles per hour.
Though his design incorporates principles from a variety of running animals, including horses and dogs, Kim zeroed in on the cheetah because of its special adaptations for speed. One feature he plans to mimic is the flexibility of the cheetah's backbone, which gives extra speed or force to its running motion.
To demonstrate how extra joints can add force and speed, Kim leans back in his chair and mimics throwing a baseball, in slow motion — first the shoulder, then the elbow, then the wrist bend. The force imparted by each of those joints adds up, allowing a pitcher to throw a faster pitch. In the same way, the joints of the cheetah's leg — hip, knee and ankle — are aided by the extra speed generated by its bending backbone, which is much more flexible than that of other running mammals.
Kim and his students plan to start building and testing prototypes within the next 18 months, after using a computer model to calculate the optimal limb length and weight, gait and torque of the hip and knee joints.
He expects that the biggest challenge will be getting enough power out of the motor to furnish the desired speed. To that end, he plans to build the robot out of lightweight carbon fiber-foam composite, so less power is needed to propel it.
Another difficult problem is coordinating the control of three joints in four legs. Those 12 joints each have to move in concert with the others, and they need to be able to react smoothly to disturbances in the gait, such as tripping over a rock, and regain balance.
Kim believes his robots could be a significant improvement over current wheeled robots used for scouting and search and rescue, which are efficient but slow. "It's going to be very exciting to see how fast we can go and how rough a terrain we can navigate."
"I always look at animals and ask why they are the way they are," says Kim, an assistant professor of mechanical engineering at MIT. "As an engineer, looking at them and speculating is fascinating."
While a graduate student at Stanford, Kim drew inspiration from the gecko to build a climbing robot, and he is now designing a running robot that mimics the movements of a cheetah. Such agile, fast-moving robots could perform military surveillance and search-and-rescue missions deemed too dangerous for humans to undertake.
His Biomimetic Robotics Lab is one of several at MIT pursuing biologically inspired engineering. A team of mechanical engineers has built robotic fish, and materials scientists have designed moisture-collecting materials that mimic a beetle's shell.
Evolution has produced finely tuned adaptations over millions of years, so it only makes sense to turn to nature for design ideas. However, while Kim seeks inspiration in nature, he's not trying to produce exact robotic copies of a particular animal. Such copying would be difficult to achieve and not necessarily the most effective design strategy.
"There are millions of things that animals have to adapt for, and it is almost impossible to compare evolution to our engineering/mathematical optimization process," says Kim. "And you have to be careful about copying other features that may not be related to the particular function you want to achieve. Therefore, extracting scientific principle is extremely important for designers like me."
Stickybot
When Kim and his colleagues at Stanford set out to build a climbing robot, at first they figured they needed to make the robot's feet sticky. However, they soon realized that very sticky feet can't detach very easily.
Their approach shifted dramatically with the 2006 discovery, by Lewis and Clark College biologist Kellar Autumn, that geckos use a phenomenon called directional adhesion to stick to walls.
"The gecko gave us a completely new perspective. Stickiness does not necessarily come from chemical composition; it can come from mechanical properties and geometry," says Kim. "The geometry enables strange phenomena such as directional adhesion, which sticks in only one direction."
The pads of a gecko's feet are covered with a forest of tiny hairs called setae, some of which are one-twentieth the width of a human hair. The setae, in turn, branch into hundreds of tiny smaller hairs called spatulae, which are about one-thousandth the width of a human hair. These hairs cling to surfaces using tiny molecular interactions known as van der Waals forces. Collectively, the forces are strong enough to support the gecko's weight as it scrambles up a vertical surface.
To demonstrate, Kim rummages around in a desk drawer in his office and pulls out a small rectangle of the gecko-inspired adhesive material, which resembles a tiny patch of blue Astroturf. A compact disc gently held against the horizontal surface attaches securely in one direction and then easily detaches in the opposite direction.
The adhesive is covered with hairs made of rubber silicone, which are thicker than those on a gecko's paw (about four times thicker than a human hair). Because thicker hairs require smoother surfaces for adhesion, Stickybot can only climb extremely smooth surfaces like glass.
Kim and his colleagues, led by Stanford professor Mark Cutkosky, first demonstrated Stickybot in 2006, and Time magazine named it one of that year's best inventions. The paper describing the robot also won the 2008 Best Paper Award for the IEEE Transactions on Robotics.
Potential applications for the stickybot technology include exterior repair of underwater oil pipelines and window washing. Kim also plans to start designing climbing equipment for humans using the directional adhesion technology.
Need for speed
Kim, who arrived at MIT as an assistant professor in June, is now turning his attention to a speedier robot, inspired by the cheetah. Four graduate students have just begun working on the cheetah project, and within the next two years Kim hopes to have a prototype that can run 35 miles per hour.
Though his design incorporates principles from a variety of running animals, including horses and dogs, Kim zeroed in on the cheetah because of its special adaptations for speed. One feature he plans to mimic is the flexibility of the cheetah's backbone, which gives extra speed or force to its running motion.
To demonstrate how extra joints can add force and speed, Kim leans back in his chair and mimics throwing a baseball, in slow motion — first the shoulder, then the elbow, then the wrist bend. The force imparted by each of those joints adds up, allowing a pitcher to throw a faster pitch. In the same way, the joints of the cheetah's leg — hip, knee and ankle — are aided by the extra speed generated by its bending backbone, which is much more flexible than that of other running mammals.
Kim and his students plan to start building and testing prototypes within the next 18 months, after using a computer model to calculate the optimal limb length and weight, gait and torque of the hip and knee joints.
He expects that the biggest challenge will be getting enough power out of the motor to furnish the desired speed. To that end, he plans to build the robot out of lightweight carbon fiber-foam composite, so less power is needed to propel it.
Another difficult problem is coordinating the control of three joints in four legs. Those 12 joints each have to move in concert with the others, and they need to be able to react smoothly to disturbances in the gait, such as tripping over a rock, and regain balance.
Kim believes his robots could be a significant improvement over current wheeled robots used for scouting and search and rescue, which are efficient but slow. "It's going to be very exciting to see how fast we can go and how rough a terrain we can navigate."