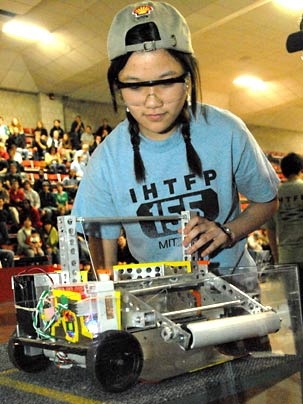


The final rounds of "I Have to Fantastically Place" (IHTFP), this year's iteration of the annual robot contest put on by students in mechanical engineering course 2.007 (Design and Manufacturing I), boiled down to a machine named Charlie and a simple plan for victory by Gregory Schroll, a sophomore in mechanical engineering.
Schroll triumphed in the last few seconds of Wednesday night's final round of 2.007 over Orian Welling, also a sophomore in mechanical engineering.
"It feels nice to win, although the congratulations are a little overwhelming. Orian was my most formidable opponent; I was lucky not to face him till the end," Schroll said.
The students' robots, all designed and built during the spring semester, had to collect balls of various weights and colors, representing various MIT courses, then drive them down an awkward, slanted table and dump them into bins, worth various "grades," or points. Graduate-level courses in engineering were worth the most points; humanities, fewer. Each round lasted 45 seconds, with 64 finalists competing on Wednesday, May 17.
Schroll described Charlie as a "robust four-wheel-drive car with a rubber roller on the front for sucking up and spitting out balls, a large inside cavity for carrying balls, and a set of three impellers inside the cavity to help push the balls out."
As for that innocent-sounding name, it was part of Schroll's competitive strategy: Opponents might see Charlie as "harmless, only to learn he's a merciless scoring machine," he said.
Third place in IHTFP went to Gina Angelosanto, a sophomore in mechanical engineering, and fourth to Shane Colton, a junior in mechanical engineering.
Angelosanto also went for the roller in front to spin and roll balls into a pan, but she added a circuit (so the pan could be raised and lowered to make driving easier) and an extending arm that blocked some of the balls from her opponent's machine. The extendo-arm of doom is a big crowd pleaser every year -- always greeted with a roar -- but two on a table tend to block each other, which led to Angelosanto's defeat.
Colton's machine was named Occam, after Occam's Razor, a principle that emphasizes the simplest solution. Occam featured tank treads with a motor controlling each side, giving it an insistent, if lumbering, maneuverability over the table terrain.
A Campus Preview Weekend visit to the 2.007 lab inspired fifth-placer Howard Kellogg, a sophomore in mechanical engineering, to come to MIT and take the course, which he described as the best he would "ever take in his life."
Kellogg took a "huge gamble" in his robot design: He went for a two-wheeled robot, sleek and single-minded, that would pick up balls and drive straight to the high-scoring "A" bin. He had his good moments -- the wheels "worked beautifully" -- and his bad, as when his machine tipped off the side of a ramp and fell over. "The table itself was my biggest opponent," he said.
Adrianne Ho, winner for most creative machine design, built something very VERY MIT -- a front-wheel-drive machine encased in a molded beaver that was engineered to perform bodily functions as it traversed the IHTFP table.
The beaver-machine "eats by means of a one-way gate which allows balls in but not out. The balls are held in a tunnel in the center of the beaver, and there is a pooping mechanism composed of a pair of flaps. I thought eating and pooping balls would be a good metaphor for digesting class materials," Ho said.
A version of this article appeared in MIT Tech Talk on May 24, 2006 (download PDF).