
The Mobile Autonomous Systems Laboratory (Maslab), is an IAP course where teams of students build robots that use a camera and sensors to navigate a course whose layout is not disclosed to the teams beforehand. The robots find red balls on the course and deposit them through mouseholes in the wall (three points each) or lift them over the wall to score field goals (five points each). Since more points were awarded for field goals, most of the 15 teams built lifting devices for their robots, including conveyor belts, elevators and arms.
My team consisted of sophmore Daniel Kane, freshman Anders Kaseorg, sophomore You Zhou and myself--all Random Hall residents.
We are pretty sure we violated every single principle of traditional good project management. We formed a team of all math majors or math double-majors. We all lived on the same floor of the same dorm, and were all either freshmen or sophomores. We took longer than the recommended time to complete our robot's mechanical construction, and made many major revisions to our software in the last 48 hours before the deadline, as opposed to debugging existing code.
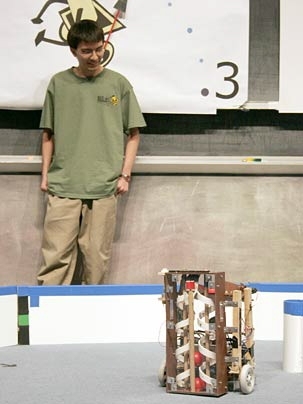
Yet when the contest day came, our robot, Archimedes Pi, somehow scored the most points.
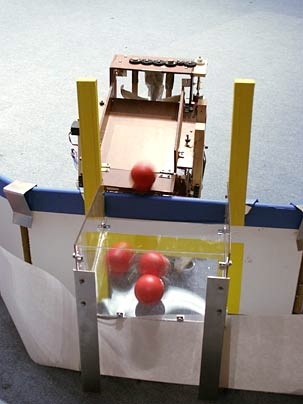
We addressed the problem of lifting balls by using an Archimedes screw, a rotating helix that pins balls against a wall then lifts them straight up into a gated overhead storage area. Archimedes screws have the advantage of taking up little space and can be run continuously. They have the disadvantage of being hard to construct and prone to jamming. We solved the jamming problem by using two screws of opposite chirality to pincer the ball against a post in the center of the screws. To make the screws, we pulled string tightly around PVC pipe to trace an outline, then sawed them by hand.
Developing clever algorithms to process input from the camera and explore the contest playing field was essential. We used Java. Our team's navigation code made a local map and dropped imaginary force-field beacons to repel the robot, turning it toward new areas. Sensors--including infrared, bump sensors, gyroscopes and optical encoders to detect wheel movements--were available to help determine position and avoid walls.
During the three-minute run, Archimedes Pi grabbed the five most-accessible balls, then dropped them over the wall to score five field goals. That 25 points made Archimedes Pi the winner.
A version of this article appeared in MIT Tech Talk on February 2, 2005 (download PDF).