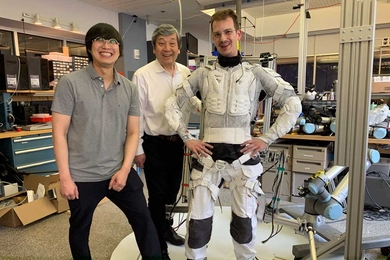
Robotic “SuperLimbs” could help moonwalkers recover from falls
A new MIT system could help astronauts conserve energy and extend missions on the lunar surface.
A new MIT system could help astronauts conserve energy and extend missions on the lunar surface.

A new “consensus game,” developed by MIT CSAIL researchers, elevates AI’s text comprehension and generation skills.
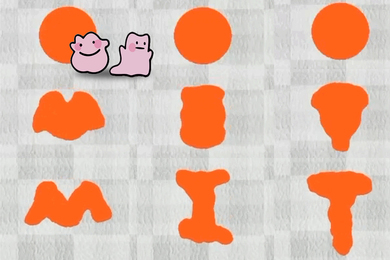
A new algorithm learns to squish, bend, or stretch a robot’s entire body to accomplish diverse tasks like avoiding obstacles or retrieving items.
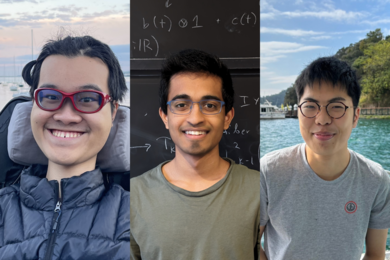
Undergraduates Ben Lou, Srinath Mahankali, and Kenta Suzuki, whose research explores math and physics, are honored for their academic excellence.

Three neurosymbolic methods help language models find better abstractions within natural language, then use those representations to execute complex tasks.
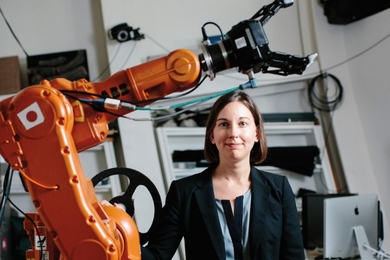
An expert in robotics and AI, Shah succeeds Steven Barrett at AeroAstro.

Fourteen Edgerton Center student-led engineering teams displayed their latest creations, from solar cars to rockets to assistive eating devices.

Iwnetim Abate aims to stimulate natural hydrogen production underground, potentially unearthing a new path to a cheap, carbon-free energy source.
New modular, spring-like devices maximize the work of live muscle fibers so they can be harnessed to power biohybrid bots.
With help from a large language model, MIT engineers enabled robots to self-correct after missteps and carry on with their chores.
A new algorithm reduces travel time by identifying shortcuts a robot could take on the way to its destination.

In class 2.679 (Electronics for Mechanical Systems II) a hands-on approach provides the skills engineers use to create and solve problems.

Developed by the Self-Assembly Lab, the 4D Knit Dress uses several technologies to create a custom design and a custom fit, while addressing sustainability concerns.
Faster and more accurate than some alternatives, this approach could be useful for robots that interact with humans or work in tight spaces.
The “oriented” samples, the first of their kind from any planet, could shed light on Mars’ ancient magnetic field.