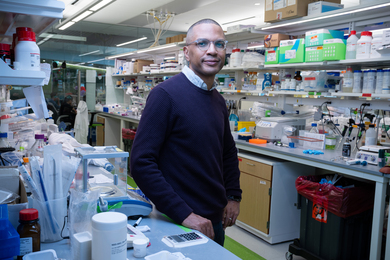
By analyzing how Myobacterium tuberculosis interacts with the immune system, the associate professor hopes to find new vaccine targets to help eliminate the disease.
With support from the Siegel Family Endowment, the newly renamed MIT Siegel Family Quest for Intelligence investigates how brains produce intelligence and how it can be replicated to solve problems.
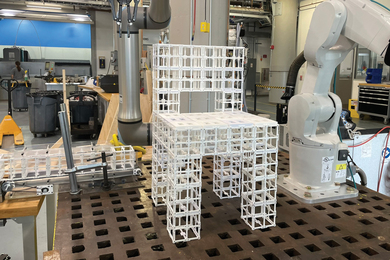
A new method could enable users to design portable medical devices, like a splint, that can be rapidly converted from flat panels to a 3D object without any tools.
Nineteen-year-old Freesia Gaul built a VR prototype thanks to MIT OpenCourseWare classes that provided “a solid foundation of knowledge and problem-solving abilities.”