Robots may be the handymen of future space missions, according to researchers at MIT. Instead of sending astronauts out to examine and repair broken satellites and spacecraft, robots may be dispatched as intelligent fix-it swarms, communicating with each other as they circle and inspect a target.
Although such a scenario is years down the road, researchers in MIT’s Space Systems Laboratory (SSL) are developing software that may eventually control such robotic inspectors in space. The group has been testing algorithms on robotic platforms called SPHERES, volleyball-sized droids built at MIT, which are now onboard the International Space Station (ISS). In the microgravity environment aboard the ISS, the robots hover in midair, much like they would in outer space. Researchers have been programming the robots to cooperate with each other as they explore and inspect their environment.
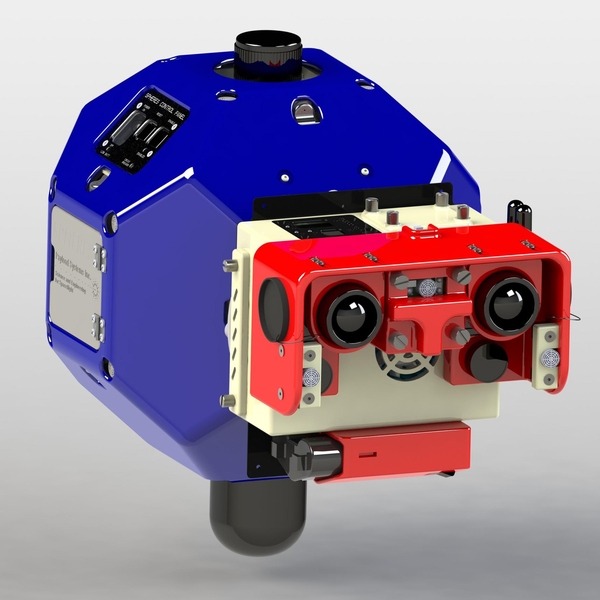
In the next few months, SPHERES (which stands for Synchronized Position Hold, Engage, Reorient Experimental Satellites) will receive two hardware upgrades developed by researchers at MIT and the University of Maryland. The first is a two-camera setup named VERTIGO, which will be mounted to the front of SPHERES much like goggles. The team will use images from the cameras to develop algorithms for vision-based navigation.
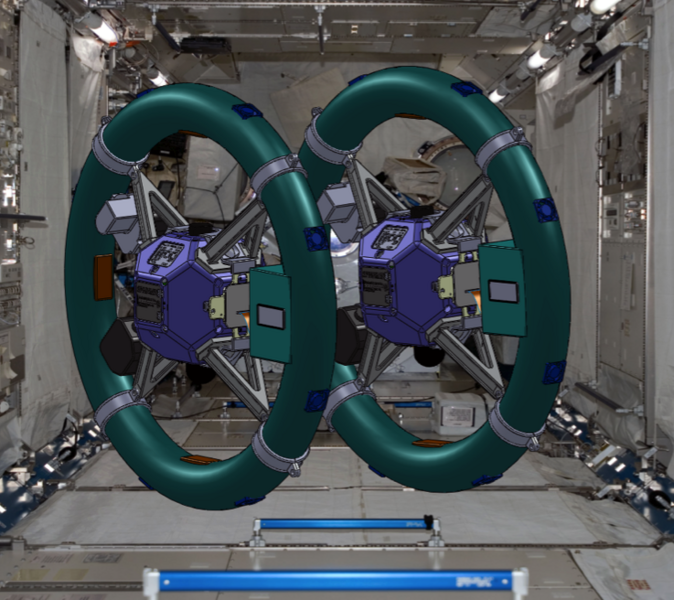
The second upgrade, called RINGS, is quite literally that: large electromagnetic rings that fit around each SPHERES robot. The rings contain electromagnetic coils that act as giant magnets, repelling or attracting other SPHERES depending on the current running through them. Controlling the current in each ring enables robots to come close to each other, or veer apart, in precise formations. The researchers say the magnets may also be used to power the robots wirelessly, via inductive wireless power transfer — a very practical development for future space missions.
“You can keep all the power systems sitting on the space station, with a big coil,” says David Miller, SSL director and professor of aeronautics and astronautics at MIT. “The inspector satellite could have a little coil on it with the cameras, and it can fly around, powered from the space station so it doesn’t have to carry its own power supply. So it can map things, inspect and come back and dock with the space station.”
Researchers recently presented the latest SPHERES developments at the American Astronautical Society’s ISS Research and Development Conference in Denver.
Eyes on navigation
Miller says the new hardware will enable researchers to test new navigation software. For instance, using the new cameras, a robot may be programmed to make its way through ISS cabins and corridors, distinguishing doorways from walls based on certain visual features.
“We’re putting eyes on the SPHERES,” Miller says. “With these goggles, SPHERES will be flying around some other object, identifying surface features like docking ports.”
The ultimate goal, however, is to develop algorithms for robots that will operate outside the ISS, inspecting satellites in space — a tricky problem, according to Alvar Saenz-Otero, associate director of the SSL.
“If a satellite is broken in space, the perfect condition would be that it’s sitting there nice and steady, waiting for you,” Saenz-Otero says. “Except if it’s broken, nothing is nice and steady; it would probably be tumbling and rotating. So that’s what we’re researching: What happens when your reference frame is rotating, and you still want to do an inspection in the optimal way?”
With VERTIGO (Visual Estimation and Relative Tracking for Inspection of Generic Objects) and RINGS (Resonant Inductive Near-field Generation System), Saenz-Otero and his colleagues will study the dynamics between a robot and a rotating object and develop algorithms that may be applied to robotic space inspectors in the future.
The combination of new hardware and software on SPHERES may enable future robots not only to inspect old spacecraft, but also to build new ones in space.
“We’re enabling algorithms for future space flight and future autonomous spacecraft,” Saenz-Otero says. “If you have another space station out there with no humans on it yet, but satellites are out there building and inspecting it, once it’s ready, then humans will go there.”
The team is making final adjustments to both hardware systems, and plans to launch VERTIGO on a rocket to the ISS in October, followed by RINGS in December.
The SPHERES team includes graduate students Brent Tweddle, Robert Truax, Greg Eslinger and Alex Buck, professors John Leonard and Peter Fisher from MIT and Raymond Sedwick from Maryland, and NASA astronaut Chris Cassidy ’00. The projects are funded by the Defense Advanced Research Projects Agency (DARPA).
Although such a scenario is years down the road, researchers in MIT’s Space Systems Laboratory (SSL) are developing software that may eventually control such robotic inspectors in space. The group has been testing algorithms on robotic platforms called SPHERES, volleyball-sized droids built at MIT, which are now onboard the International Space Station (ISS). In the microgravity environment aboard the ISS, the robots hover in midair, much like they would in outer space. Researchers have been programming the robots to cooperate with each other as they explore and inspect their environment.
In the next few months, SPHERES (which stands for Synchronized Position Hold, Engage, Reorient Experimental Satellites) will receive two hardware upgrades developed by researchers at MIT and the University of Maryland. The first is a two-camera setup named VERTIGO, which will be mounted to the front of SPHERES much like goggles. The team will use images from the cameras to develop algorithms for vision-based navigation.
The second upgrade, called RINGS, is quite literally that: large electromagnetic rings that fit around each SPHERES robot. The rings contain electromagnetic coils that act as giant magnets, repelling or attracting other SPHERES depending on the current running through them. Controlling the current in each ring enables robots to come close to each other, or veer apart, in precise formations. The researchers say the magnets may also be used to power the robots wirelessly, via inductive wireless power transfer — a very practical development for future space missions.
“You can keep all the power systems sitting on the space station, with a big coil,” says David Miller, SSL director and professor of aeronautics and astronautics at MIT. “The inspector satellite could have a little coil on it with the cameras, and it can fly around, powered from the space station so it doesn’t have to carry its own power supply. So it can map things, inspect and come back and dock with the space station.”
Researchers recently presented the latest SPHERES developments at the American Astronautical Society’s ISS Research and Development Conference in Denver.
Eyes on navigation
Miller says the new hardware will enable researchers to test new navigation software. For instance, using the new cameras, a robot may be programmed to make its way through ISS cabins and corridors, distinguishing doorways from walls based on certain visual features.
“We’re putting eyes on the SPHERES,” Miller says. “With these goggles, SPHERES will be flying around some other object, identifying surface features like docking ports.”
The ultimate goal, however, is to develop algorithms for robots that will operate outside the ISS, inspecting satellites in space — a tricky problem, according to Alvar Saenz-Otero, associate director of the SSL.
“If a satellite is broken in space, the perfect condition would be that it’s sitting there nice and steady, waiting for you,” Saenz-Otero says. “Except if it’s broken, nothing is nice and steady; it would probably be tumbling and rotating. So that’s what we’re researching: What happens when your reference frame is rotating, and you still want to do an inspection in the optimal way?”
With VERTIGO (Visual Estimation and Relative Tracking for Inspection of Generic Objects) and RINGS (Resonant Inductive Near-field Generation System), Saenz-Otero and his colleagues will study the dynamics between a robot and a rotating object and develop algorithms that may be applied to robotic space inspectors in the future.
The combination of new hardware and software on SPHERES may enable future robots not only to inspect old spacecraft, but also to build new ones in space.
“We’re enabling algorithms for future space flight and future autonomous spacecraft,” Saenz-Otero says. “If you have another space station out there with no humans on it yet, but satellites are out there building and inspecting it, once it’s ready, then humans will go there.”
The team is making final adjustments to both hardware systems, and plans to launch VERTIGO on a rocket to the ISS in October, followed by RINGS in December.
The SPHERES team includes graduate students Brent Tweddle, Robert Truax, Greg Eslinger and Alex Buck, professors John Leonard and Peter Fisher from MIT and Raymond Sedwick from Maryland, and NASA astronaut Chris Cassidy ’00. The projects are funded by the Defense Advanced Research Projects Agency (DARPA).





