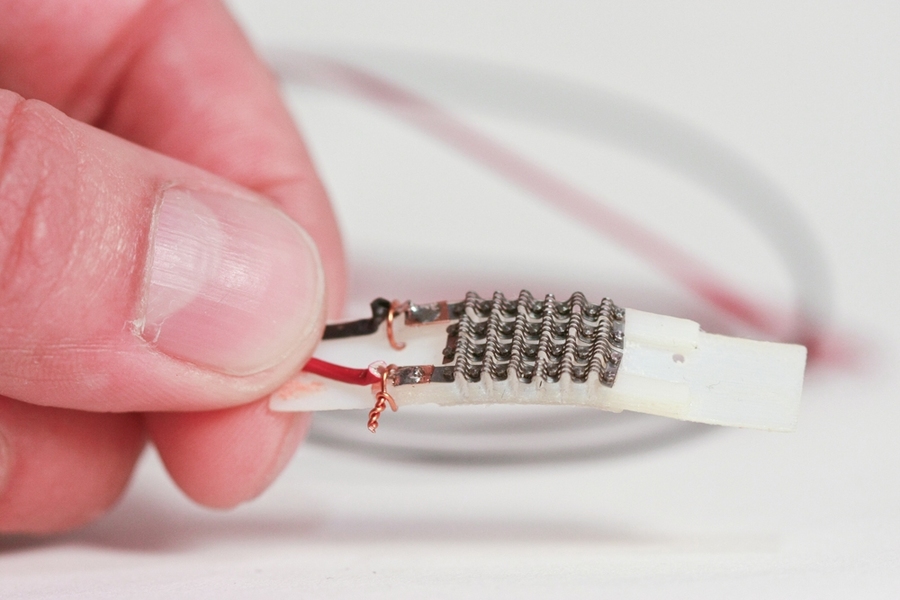
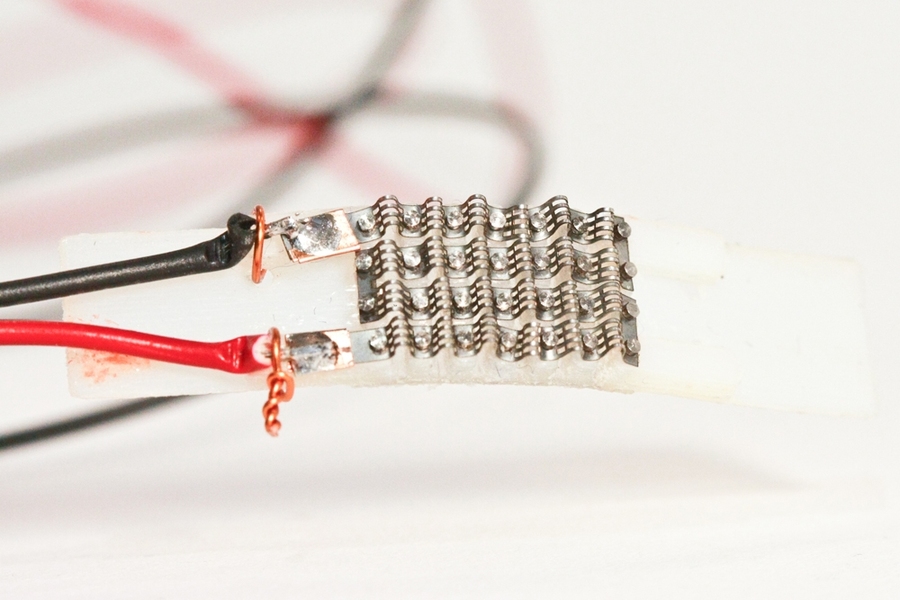
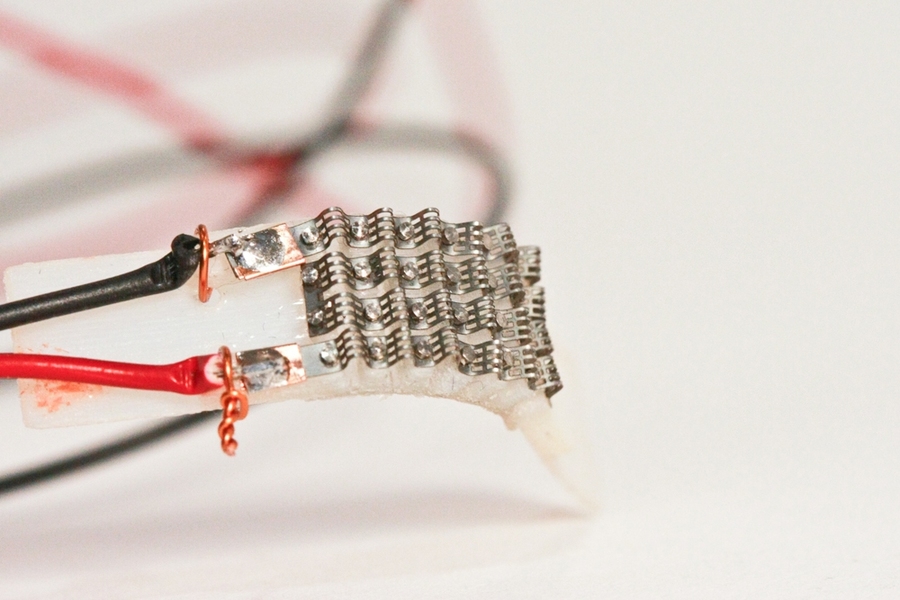
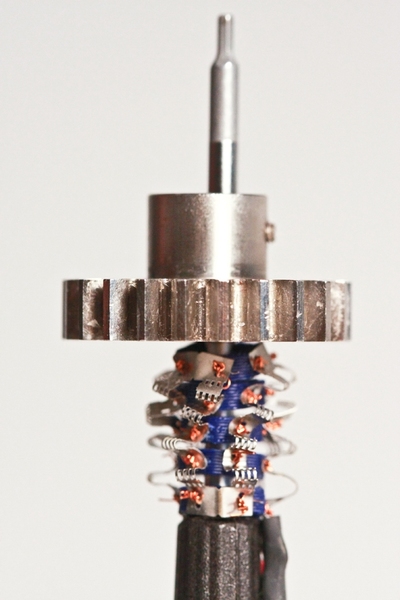
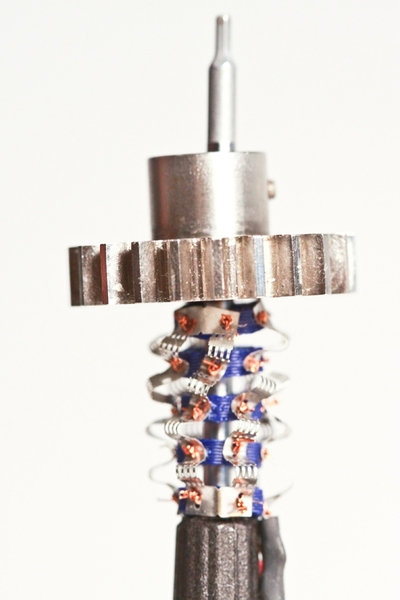

MIT researchers have found a new way to use shape-memory alloys — metals that change shape when heated — to create small mechanical “muscles” for electronic devices. The mechanical muscles — or actuators — can produce three to six times as much torque as electric motors of similar size but weigh no more than one-20th as much.
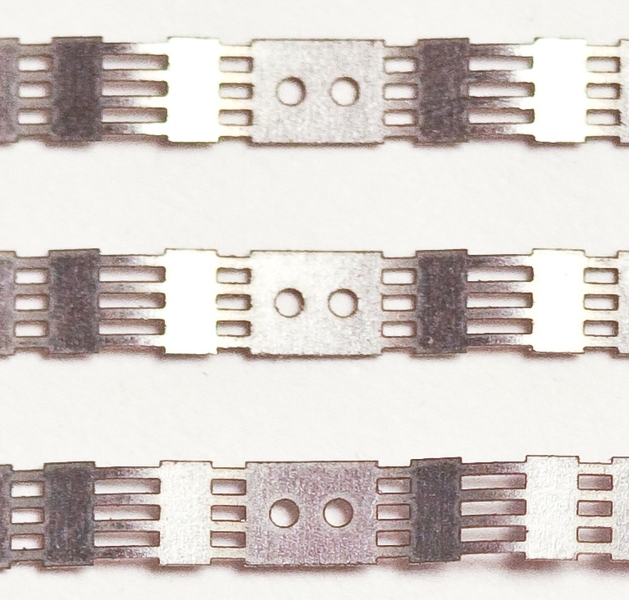
Previous experimental actuators have used springs made from shape-memory alloys. But the new actuator is easier to manufacture, since it can be cut out of a flat sheet of metal, and to mount, since the sheet can be bolted to a mechanical device’s moving parts. And since only a small section of the new actuator heats up when electrically charged — as opposed to the entire length of the spring — it should dissipate heat more easily and consume less energy.
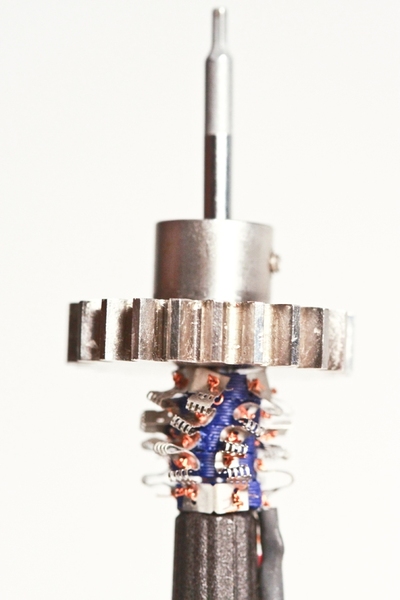
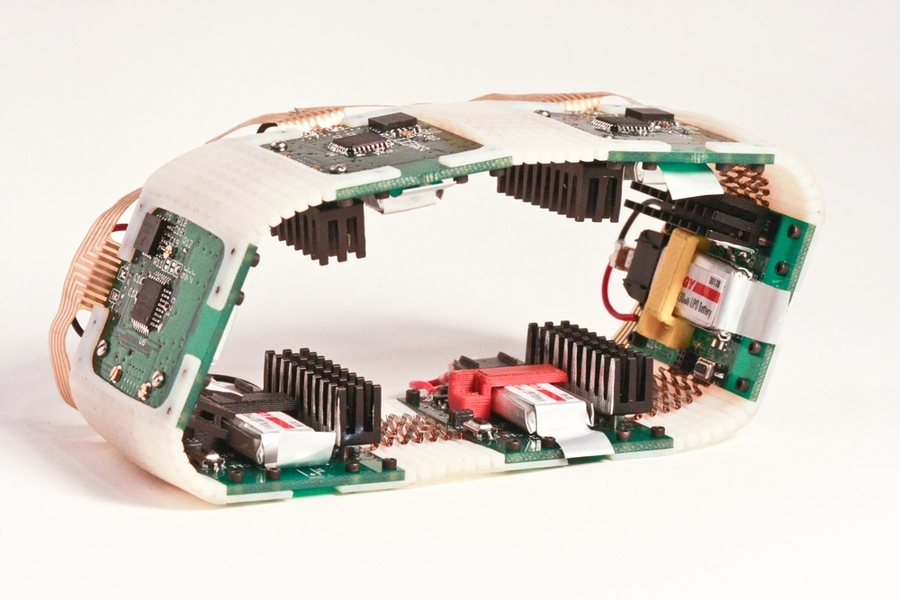
Eduardo Torres-Jara, a postdoctoral associate in the lab of Professor of Computer Science and Engineering Daniela Rus, designed the actuators and fabricated them with the help of graduate student Kyle Gilpin and research assistant Josh Karges. The researchers envision the actuators’ use in devices too small for electric motors, such as the moving parts at the tips of minimally invasive surgical devices, or the tiny cameras built into laptops.