


When engineers design a new aircraft, they carry out much of the initial testing not on full-sized jets but on model planes that have been scaled down to fit inside a wind tunnel. In this more manageable setting, they can study the flow of air around an aircraft under all manner of experimental conditions.
Scientists can then apply scaling laws — mathematical relationships of proportionality — to extrapolate how a full-size jet would perform, based on the behavior of its miniature counterpart.
Now engineers at MIT have come up with a similar scaling law to describe how objects move through sand. The scaling law can be used to predict how large trucks and cars drive through this material, based on how toy versions of those vehicles drive through an experimental sandbox containing the same grains.
Ken Kamrin, associate professor of mechanical engineering at MIT, says the scaling law may enable a wide range of small-scale experiments to hone the design of large-scale vehicles, such as more optimized tractors, bulldozers, and tanks. It might also be applied to translate a vehicle’s locomotion on Earth to a rover’s navigation on Mars, because the relation allows for the scaling of gravity as well.
“I’m excited that this could be a new tool we can use to design rovers for Mars,” Kamrin says. “If we had a simulant of Martian soil in the lab, we could do experiments with a wheel shape that we want to test, and then use this scaling law to, with more accuracy, be able to tell you if that wheel would get stuck on Mars.”
Kamrin has published a paper detailing the scaling law in the journal Physical Review E. His co-authors are former graduate student James Slonaker, former undergraduate D. Carrington Motley, graduate student Qiong Zhang, undergraduate student Stephen Townsend, former research scientist Carmine Senatore, and principal research scientist Karl Iagnemma.
Giving backbone to scaling
Aircraft engineers typically use scaling laws to, for example, determine the minimum force of lift required to keep a full-sized jet aloft, based on the same minimum lift for a model plane. Such scaling laws are initially derived from physics-based equations that describe the way a fluid, such as air, behaves.
“The thought is, if you can identify scalings within the fluid flow equations, they can be used as an immediate way of translating between small- and large-scale results,” Kamrin says.
His team looked for ways to derive a scaling law from common equations for granular flow. They first looked to a generalized set of equations, known as resistive force theory (RFT), which is used to calculate the resistive force on an object moving through a bed of grains such as sand.
“RFT is not going to predict how sand moves or distributes stress,” Kamrin says. “Its sole purpose is to tell how much force is needed to move an object of an arbitrary shape, in a certain direction, through sand.”
The researchers sought to simplify the RFT formula by making many of its inputs dimensionless, or without units.
“This ultimately lets us extract the scaling relations,” Kamrin says. “For example, ‘meters’ is not a natural length — it’s something we invented. If we get rid of all these units, we will be left with the meat, some truth to the system.”
Kamrin’s team used Buckingham’s theorem, the backbone of mathematical scaling, to winnow certain variables in RFT, such as an wheel’s length, width, and mass, into dimensionless parameters, thereby simplifying the overall equation. The idea is that, by deriving an equation that is not dependent on certain units, that same equation can be used to produce rules for how to translate between scales of the same system.
After deriving a scaling law from RFT, the researchers looked to see whether they could do the same with another set of granular flow equations, a continuum model based on frictional yielding. These much more detailed equations describe the flow of sand and the force that it creates as it pushes against an intruding object such as a wheel. Even for these more complex equations, the team found it was able to derive a scaling law that matched the one it developed from the simpler RFT model.
“Turns out they both gave the same answer, so we thought maybe this [scaling law] will work,” Kamrin says.
Driving tests
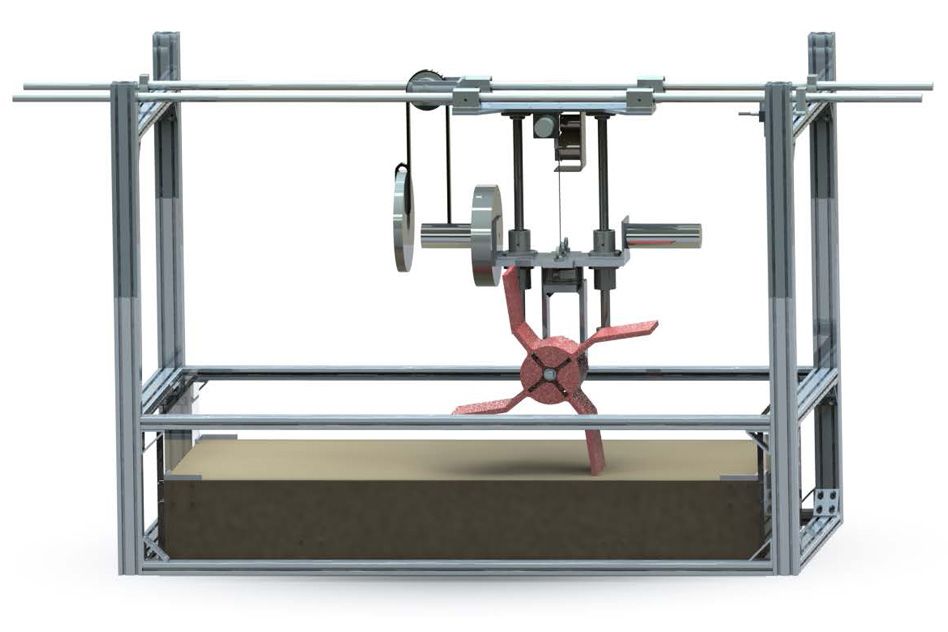
To test the scaling law, Kamrin and his colleagues performed experiments in MIT’s Robotic Mobility Group lab, where engineers have set up a rail and pulley system that supports a motorized wheel as it drives through an underlying sand bed. Kamrin’s team used a 3-D printer to construct small and large versions of two different wheel shapes: a typical cylindrical design and a “lug” wheel with four arms extending from a central cylinder.
The two shapes were chosen to demonstrate two distinct driving behaviors, as cylindrical wheels drive smoothly with limited sinkage, while lug wheels dig through and remove pockets of sand as they drive.
The researchers measured each wheel’s dimensions and loaded them up with varying amounts of weights, then drove each wheel through the sand bed one at a time, noting the power and speed of the small wheels compared with their larger counterparts.
They performed 288 such experiments, each time varying the wheel’s dimensions, rotation speeds, and masses. They then used their scaling law to see whether they could predict the large wheels’ velocity and power, based on their smaller versions’ performance.
“Our data followed the predictions,” Kamrin says. “The small tests predicted the big tests, to a quantitative degree. We validated many times over the accuracy of the scaling law.”
“Professor Kamrin has remarkable intuition into the physics of granular material. I imagine that taking a step back and recognizing that insofar as mobility on granular terrain is concerned, we are not interested in how the grains of sand behave, allowed for a fresh perspective on this problem,” says Dan Negrut, a professor of mechanical engineering at the University of Wisconsin at Madison, who was not involved in the research. “It’s quite an accomplishment that opens a new chapter in approaching the problem of characterizing mobility on granular terrains.”
Going forward, the team says its scaling law can be used to design vehicles that can better navigate sandy terrain.
“Think of bulldozers, excavators, all these things that need to manipulate and move granular material around,” Kamrin says. “These aren’t really optimized. A lot of equipment used in industry is based on rules of thumb, but results like this could provide a new kind of tool to help pinpoint the best designs.”
This research is supported, in part, by the Army Research Office and the National Science Foundation.