Alberto Rodriguez, an assistant professor of mechanical engineering, and incoming graduate student Nikhil Chavan-Dafle presented their work on robotic extrinsic dexterity — which they began at Carnegie Mellon University — at the recent International Conference on Robotics and Automation, where their research video (see below) was selected as a finalist for Best Video Award.
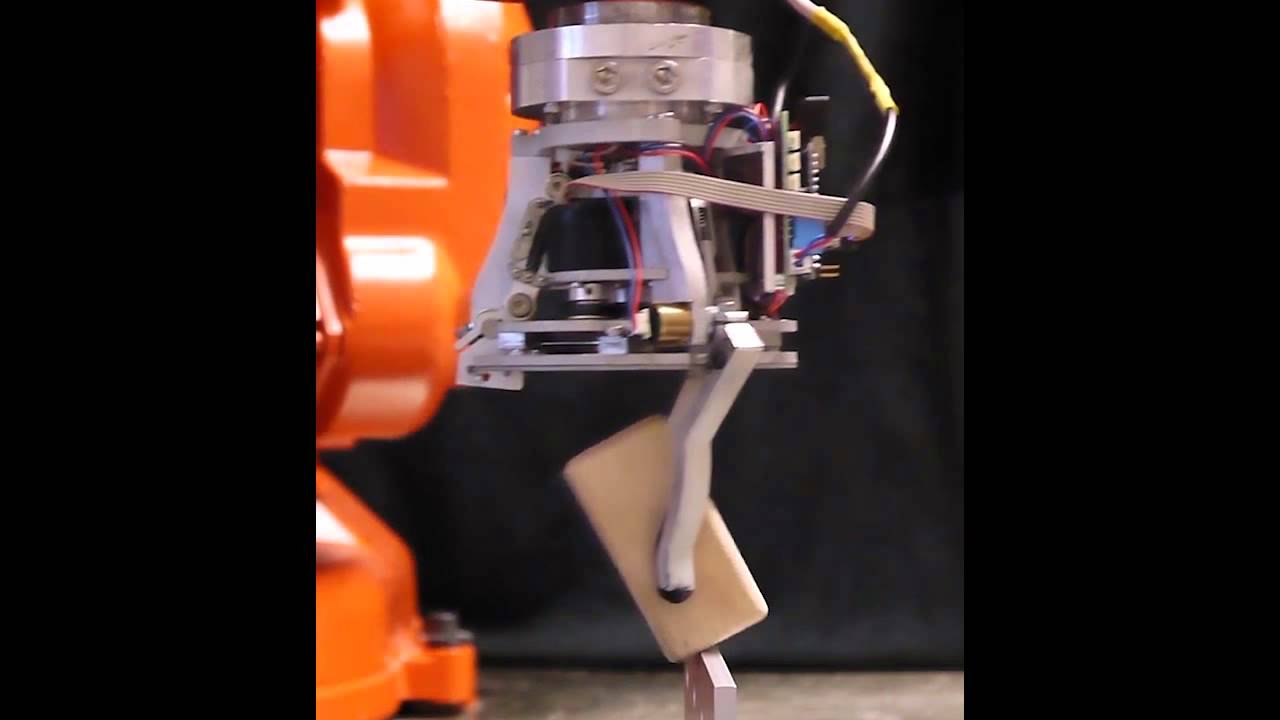
The research he conducted along with Chavan-Dafle — and in collaboration with researchers from Carnegie Mellon and ABB Robotics — explores the manipulation of an object in the hand by exploiting external resources, such as gravity and inertia, or contact with the environment. The team’s purpose is to significantly improve the historically difficult maneuver of regrasping by robots — particularly in manufacturing scenarios — which hasn't been achieved well through finely controlled finger dexterity. The researchers have developed a repertoire of 12 regrasps that allow robots to take advantage of environmental factors, enabling simpler robotic hands.