Sometimes the fastest pathway from point A to point B is not a straight line: for example, if you’re underwater and contending with strong and shifting currents. But figuring out the best route in such settings is a monumentally complex problem — especially if you’re trying to do it not just for one underwater vehicle, but for a swarm of them moving all at once toward separate destinations.
But that’s just what a team of engineers at MIT has figured out how to do, in research results to be presented in May at the annual IEEE International Conference on Robotics and Automation. The team, led by Pierre Lermusiaux, the Doherty Associate Professor in Ocean Utilization, developed a mathematical procedure that can optimize path planning for automated underwater vehicles (AUVs), even in regions with complex shorelines and strong shifting currents. The system can provide paths optimized either for the shortest travel time or for the minimum use of energy, or to maximize the collection of data that is considered most important.
Collections of propelled AUVs and gliding AUVs (also called gliders) are now often used for mapping and oceanographic research, for military reconnaissance and harbor protection, or for deep-sea oil-well maintenance and emergency response. So far, fleets of up to 20 such AUVs have been deployed, but in the coming years far larger fleets could come into service, Lermusiaux says, making the computational task of planning optimal paths much more complex.
He adds that earlier attempts to find optimal paths for underwater vehicles were either imprecise, unable to cope with changing currents and complex topography, or required so much computational power that they couldn’t be applied to real-time control of swarms of robotic vehicles.
Video: Melanie Gonick
While researchers have studied such systems for many years, “what was missing were the methodology and algorithm,” he says — the mathematics allowing a computer to solve such path-planning riddles rigorously but quickly enough to be useful in real-world deployments. “Because ocean environments are so complex,” he says, “what was missing was the integration of ocean prediction, ocean estimation, control and optimization” for planning paths for multiple vehicles in a constantly changing situation. That’s what MIT’s Multidisciplinary Simulation, Estimation, and Assimilation Systems (MSEAS) group, led by Lermusiaux, has now developed.
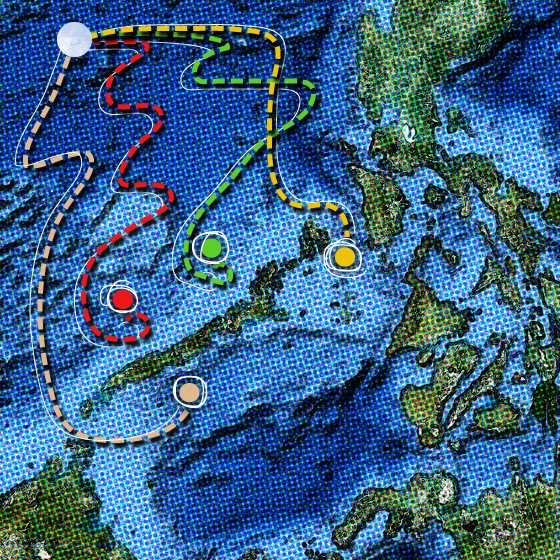
The team’s simulations have successfully tested the new algorithms in models of very complex environments — including an area of the Philippines amid thousands of islands with convoluted shorelines, shallows and multiple shifting currents. They simulated a virtual fleet of 1,000 AUVs, deployed from one or more ships and seeking different targets. Adding to the complication, the system they devised can even account for “forbidden” zones that the craft must avoid and fixed obstacles that affect both the underwater craft and the flow of the currents, and even moving obstacles, such as passing ships.
Taking advantage of the “free ride” offered by the currents, the craft often follow startlingly indirect pathways, meandering around in loops and whorls that sometimes resemble a random walk. That’s because it can be much quicker to drift with a current and then double back than to try to cut straight across, fighting the flow the whole time. In other cases, the AUV may find a quicker or more energy-efficient path by rising over, or diving under, jets, currents, eddies or other ocean features. Uncertainties in ocean predictions — and how they affect the optimal paths — can also be accounted for.
In addition to finding paths that are quickest or most efficient, the system allows swarms of data-collection vehicles to collect the most useful data in the fastest time, Lermusiaux says. These data-optimizing approaches could be useful for monitoring fisheries or for biological or environmental studies — such as a new National Science Foundation effort to characterize the New England Shelf Break, an area important to the region’s fisheries as well as for climate research.
While the methodology and algorithms were developed for an underwater environment, Lermusiaux explains that similar computational systems could be used to guide automated vehicles through any kind of obstacles and flows — such as aerial vehicles coping with winds and mountains. Such systems could even potentially help miniature medical robots navigate through the circulatory system, he says.
The algorithm allows for real-time control and adjustments — such as to track a plume of pollution to its source, or to determine how it is spreading. The system can also incorporate obstacle-avoidance functions to protect the AUVs.
The team included mechanical engineering graduate students Tapovan Lolla and Mattheus Ueckermann SM ’09, Konuralp Yigit SM ’11, and research scientists Patrick Haley and Wayne Leslie. The work was funded by the Office of Naval Research and by the MIT Sea Grant College Program.
Glen Gawarkiewicz, a senior scientist at Woods Hole Oceanographic Institution who was not involved in thus research, says, “This work is significant. It brings rigor to the difficult problem of designing sampling patterns for autonomous vehicles. As the capabilities and the numbers of autonomous vehicles increase, this methodology will be an important tool in oceanography and other fields.”